1-3-5 ステッピングモータ
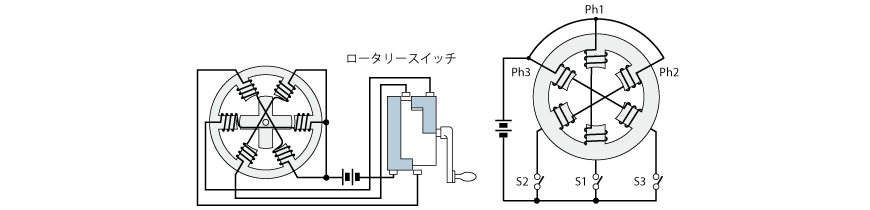
ステッピングモータ(stepping motor)の原形は、6コイル集中巻ステータ(図1.21)と凸極珪素鋼板ロータ(図1.22)を組み合わせたもので、図1.23のような1920年代の軍艦(イギリス海軍)で、魚雷の発射方向を指示するアクチュエータとして採用されました。
このモータでは、巻線への電流切り換えにロータリースイッチが利用されていました。
図1.23の右側では、これらのスイッチの機能をS1、S2、S3で示しています。
かつてステッピングモータの呼称として、step-by-step motorというものがありましたが、やがて、stepping motorや、step motorが一般的になりました。
また、stepper motorということもあります。
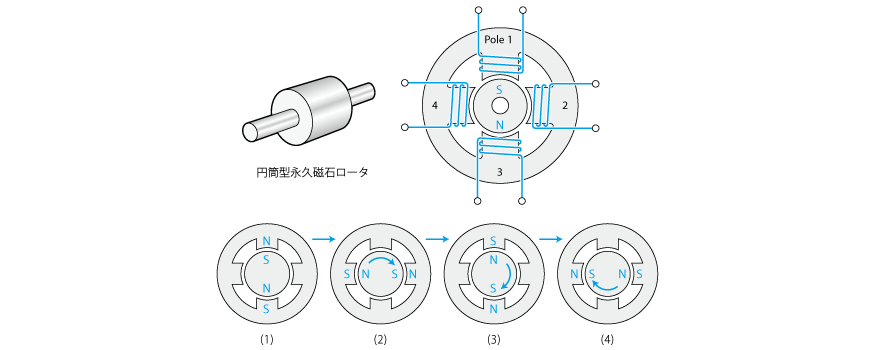
図1.24は、ステータ巻線の電流を切り換えることによって、ロータ位置がステップ状に回転する様子を示しています。

[5]-(1) VR型ステッピングモータ
ステッピングモータでは、ロータがある角度だけ回転して停止した後、その位置を保持することが要求されます。
このためには、電流によって励磁されたポール(pole:大きな歯または極歯)がロータの歯と磁力によって整列するという原理を利用します。
ステータとロータの歯数の比率が6:4の構造では、この原理による位置決め分解能は1回転について12となります。つまり、30°間隔での位置決め可能です。
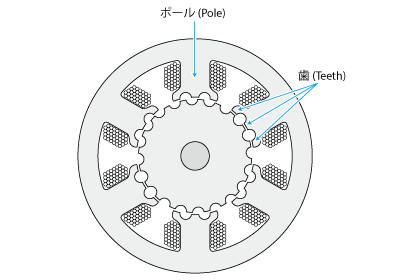
高分解能を実現するための方策としては、図1.25で見るようにポールに細かい歯を刻み、ロータの歯も同様に細かくする方法(図1.26)が採られます。
このように、永久磁石を使わないステッピングモータをVR型ステッピングモータ(Variable Reluctance stepping motor)と呼びます。
歴史を振り返ると、工作機械やコンピュータ周辺装置用として、いろいろな形式のVR型モータが製造されました。
VR型の利点は、機械加工によって細かい歯を刻み、またステータとロータ間のギャップ長を短くすることによって、高い分解能が実現できる点にあります。
欠点としては、小型化と大トルク化の両立が困難なことです。そのために今日では、VR型はステッピングモータとしてよりは、むしろブラシレスモータの一種であるスイッチドリラクタンスモータ(Switched Reluctance Motor:SRM)としての利用に関心が集まっています。
(360°の分割数)が上がる
VR型ステッピングモータを構成する
[5]-(2) PM型ステッピングモータ
VR型とは別に、永久磁石を利用したPM型ステッピングモータ(Permanent Magnet stepping motor)も開発されました。これは基本的に、ロータとして図1.27の永久磁石ロータを利用したものです。実際の例としては、図1.28のような4コイルステータと2極磁石ロータの組み合わせが典型です。このモータが進化したのが、腕時計用ステッピングモータの分野です。小型化しても、強力な永久磁石のために電力の消耗が少ないのが特長です。1個の電池で、数年間も秒針を含めて、3本の針を駆動させることが可能です。
[5]-(3) ハイブリッド型ステッピングモータ
VR型とPM型の両方の利点を生かした複合型が、今日広い用途を持つハイブリッド型ステッピングモータ(hybrid stepping motor)です。生産台数ではクローポール型と呼ばれている形式が多いのですが、広い意味で、これもハイブリッド型の一種とみなされます。
元来、ハイブリッドとは、生物学における交配種のことを示します。ここではVR型構造によってきめ細かなステップ角刻みが実現され、これに永久磁石を組み合わせてトルク増大が実現されることを意味します。
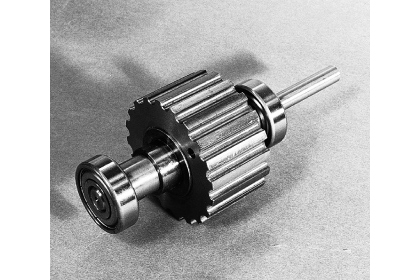
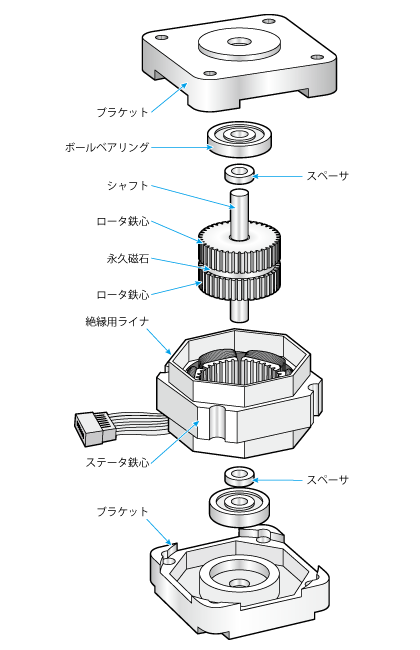
その構成を図1.29に示します。基本的には、図1.30のロータ構造に見られるように、歯を刻んだ2枚の鉄心で、ディスク型の永久磁石をサンドウィッチ状に挟んだものです。
図1.30誘導子型ロータ
フェライト永久磁石が歯を刻んだ2枚の鉄心にサイドウイッチ状に挟まれている。この磁石は一方の面がN極なら他方はS極である。軸方向に垂直な断面にはNかSの一つの磁極しか現れない。これがユニポーラ(単極)である。両側の珪素鋼板の歯には磁極が誘導されるので誘導子と呼ぶ。軸方向にみるとあたかも極数の多い永久磁石ロータのように見える。ハイブリッド型ステッピングモータとして利用される。
[5]-(4) クローポール型PMステッピングモータ
OA用機器として多用されているステッピングモータが、このクローポール型PMステッピングモータ(claw-pole PM stepping motor)です。