2-3-3 誘導モータの特性
1章でみたように、回転磁界型モータの同期速度は、次式で決定されます。
NS:同期回転速度(分速)[rPM] N0:同期回転速度(秒速)[rps]
f:電源周波数[Hz] p:モータ極数
すべり
誘導モータの動作を考える上で重要なことがあります。それは、コイルに電流が流れるためには、コイルが磁界を横切る必要があることです。
そのためには、磁界とコイルとの間には、相対的な速度差が必要です。
この速度差のためモータは、同期速度よりわずかに遅い速度で回転することになります。
この同期速度との速度差をすべりといい、sで表します。すべりsは、次式で表されます。
N:ロータ回転速度[rpm] NS:同期回転速度[rpm]
すべりは通常、百分率で表現され、動力用誘導モータのすべりは、定格負荷運転で2~3.%です。小型単相モータでは、もう少し大きな値です。
回転速度とトルク
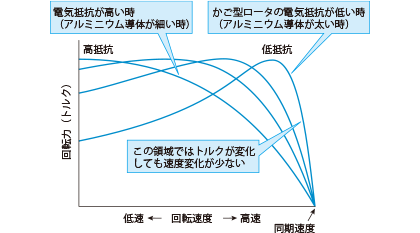
誘導モータの特性を図2.40 に示します。ロータのアルミ導体の電気抵抗が低くなるよう設計されたモータは、高速域で効率が高くなり、電気抵抗が高くなるよう設計されたモータでは低速域でのトルクが多くなります。
電気抵抗の低いモータでは、特性曲線の最大トルクより右側の領域では、負荷が増えても速度がわずかに低下するだけで、トルクが増加して安定します。
つまり、このモータは負荷が変化しても、速度はほとんど変化しないのです。
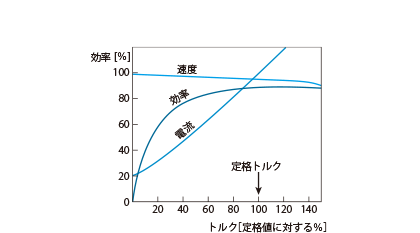
このモータの特性を、横軸をトルクに、縦軸を回転速度にして描画し、さらにこのときの電流と効率を描画すると図2.41 のようになります。
このグラフと先のDCモータの特性とを比較すると、誘導モータの特徴として、次のようなことがわかります。
- ●負荷が変化すると、それに応じてトルクが変化するが速度はあまり変化しない
- ●トルクと電流の関係は直線にならない