1-3-2 无刷直流马达
克服了直流马达缺点(电刷和整流子)的马达有无刷直流(brushless DC motor)马达。其特点有,
①将永磁励磁型直流马达的励磁用永久磁铁(定子侧)和电枢线圈(转子侧)进行了交换,将励磁用永久磁铁配置到了转子侧,电枢线圈在定子侧
②将基于整流子位置变化的,使用电刷的通电切换替换成为了检测转子位置信号而使用霍尔元件,先反馈到变频器再对通电进行控制
这就是无刷直流马达。图 1.7 表示无刷直流马达的系统构成。
由于变频器发出的驱动电压变成了交流,因此,作为以交流进行驱动的永磁同步马达,也可以视为交流马达。但,本书将其视为一个独立领域的无刷直流马达。
由于旋转原理与直流马达类似,因此,扭矩与速度的关系几乎与直流马达相同。
在拥有直流马达优异的控制性能的同时,与直流马达相比,由于没有电刷,因此,还具有在电磁干扰及使用寿命上占有优势、效率高,节能、以及设计自由度强,容易进行设备组装设计等各种特点。因此,不仅应用到可发挥这种优点的HDD(硬盘驱动器)及CD-ROM驱动器这样的信息中,还广泛应用到冰箱及洗衣机等家电产品中。
无刷直流马达出现并发展的过程中,初期的定子线圈使用了分布绕组,但最近基本上都使用集中式绕组了。关于分布绕组和集中式绕组,请参考专栏中的“分布绕组和集中式绕组”。
此外,根据转子上的永久磁铁安装方法,可分为,
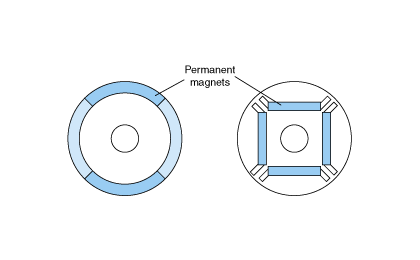
- (1) 表面磁铁型(Surface Permanent Magnet:SPM)
- (2) 嵌入磁铁型(Interior Permanent Magnet:IPM)
等。表面磁铁型:SPM是在转子外周贴上永久磁铁的类型(参考图1.8)。
嵌入磁铁型:图1.8(右)表示IPM的截面构造。IPM型中,永久磁铁的嵌入方法有多种。IPM型构造的目的是利用离心力来减小磁铁剥落的危险,以及积极利用磁阻扭矩(参考后面介绍的可变磁阻马达项目)。
还有一种分类方法是,在检测SPM及IPM的磁极位置时,是使用霍尔元件及旋转编码器等传感器,还是省略(无传感器驱动)。
作为传动装置安装无刷直流马达时,马达本体和驱动用变频器及控制电路等会设计得非常紧凑。图 1.9 表示其中一个实例。
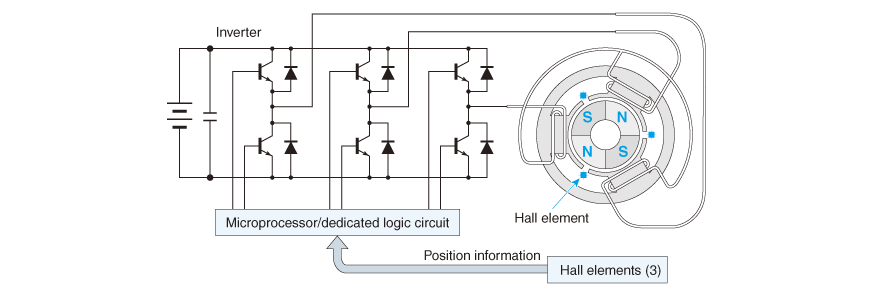
微处理器/专用逻辑电路
采用IPM 型的目的是可防止离心力导致磁铁剥离,可有效利用磁阻扭矩

马达自身厚度2mm
分布绕组和集中式绕组
图1.10表示通过24个切槽的定子实现(a)4极和(b)8极的情况。但,通过切换线圈接线来更改极数的方法,由于非常复杂,故性能不好,最近已被淘汰。
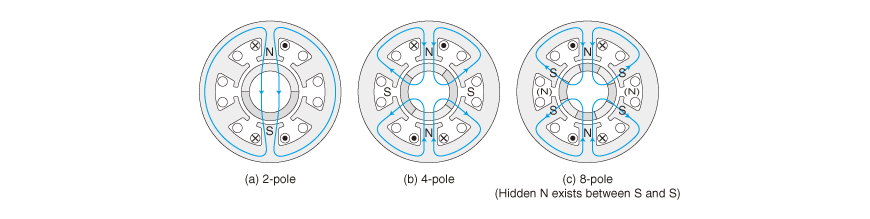
另一方面,如图1.11所示,6线圈集中式绕组定子,尽管切槽数较少,但利用接线可变成(a)2极、(b)4极及(c)8极马达。
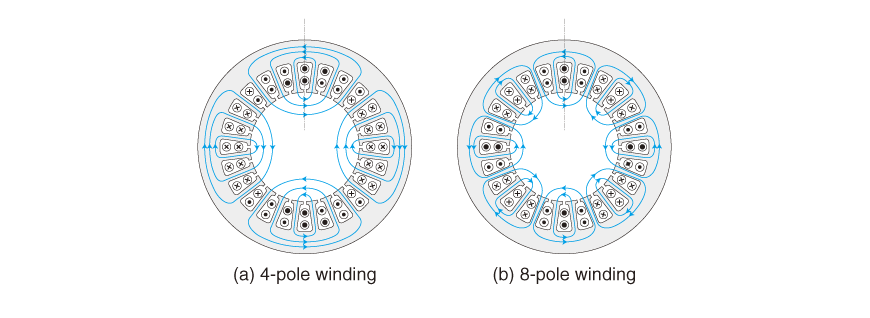
24切槽时,可实现各种各样的极数,这里列出了(a)4 极线圈和(b)8 极线圈的情况。
尽管切槽数较少,但利用接线可变成(a)2极、(b)4极及(c)8极马达。
图里列出了只在U 相的2个线圈上接通电流的情况。(b)和(c)的接线相同,但根据转子的极数,可支持 4 极及 8 极。但,6极马达很难。
转换器和变频器