2-4-3. Characteristics of Stepping Motors
Fig. 2.57 shows the relationship between the torque and speed of a stepping motor by taking the torque on the vertical axis and the pulse frequency on the horizontal axis. Two curves are drawn in the figure. They are respectively called the starting characteristic curve and the continuous characteristic curve.
Starting Characteristics
The starting characteristics indicate the level of load torque up to which a motor in a standstill state can withstand when starting its operation while pulses of a constant frequency are applied to the motor. It is also called the pull-in torque characteristics. The maximum torque of stepping motors is usually defined as the startup torque at a pulse frequency of 10 Hz. When we talk about stepping motors, the term pulse rate is usually used in place of pulse frequency. And for the unit, pps (pulses per second) seems to be used more often than Hz.
Continuous Characteristics
The continuous characteristics indicate the level of load torque up to which a motor can withstand when continuing its operation while it is operating on pulses of a constant frequency. These characteristics are also called the slew torque characteristics or pull-out torque characteristics.
The value of the continuous characteristics becomes higher than that of the starting characteristics.
The values of both starting and continuous characteristics fall as the pulse frequency increases.
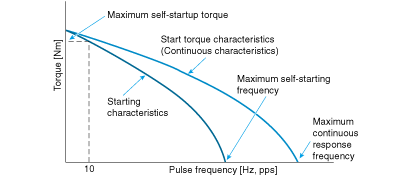
The frequency up to which a motor can maintain continuous operation is called the maximum continuous response frequency, and the frequency up to which it can start its operation is called the maximum pull-in pulse rate.
The torque of stepping motors is reduced in a high speed area because electric current does not flow easily at high frequencies due to the winding inductance.
The starting and continuous characteristics of stepping motors vary depending on the excitation method and drive circuit. Therefore, when evaluating the characteristics of stepping motors, you must consider various factors including the relationship with the drive circuit.
<Short column> Holding torque
If external force is applied to a stepping motor when it is stopped but energized, the attractive force generated between the rotor and stator works to maintain the stop position of the motor.
This torque of withstanding the external force is called the holding torque.
<Short column> Detent torque
Due to the attraction force of the rotor magnet, PM and HB stepping motors have a certain level of holding torque even when they are not energized. This torque is called the detent torque.
Conversion of pulse rate and rotating speed
The speed of stepping motors is generally expressed in [pps], which is the pulse number (number of steps) per second. It is also called the pulse rate or step rate.
However, [rpm] (revolutions per minute) is more convenient in some cases.
The following table shows the conversion of the relationship between the number of steps per motor rotation and [pps] into [rpm]. And Fig. 2.58 shows a conversion graph.