モータの不思議と更なる可能性の探究
第五回 人の手の動きを再現する可能性へ 超音波モータ
モータの種類は大変豊富で用途に応じて様々な体格と特性のものが作られています。そのほとんどが電流と磁気を使うもので、電磁モータと総称されます。これ以外に静電モータと超音波モータがあります。前回の最後のところでステータとロータの間に空隙のないモータとして超音波モータがあることを書きました。
ここでは、これら3種類のモータを比較しながら、特に超音波モータとはどんなものなのかを解説します。
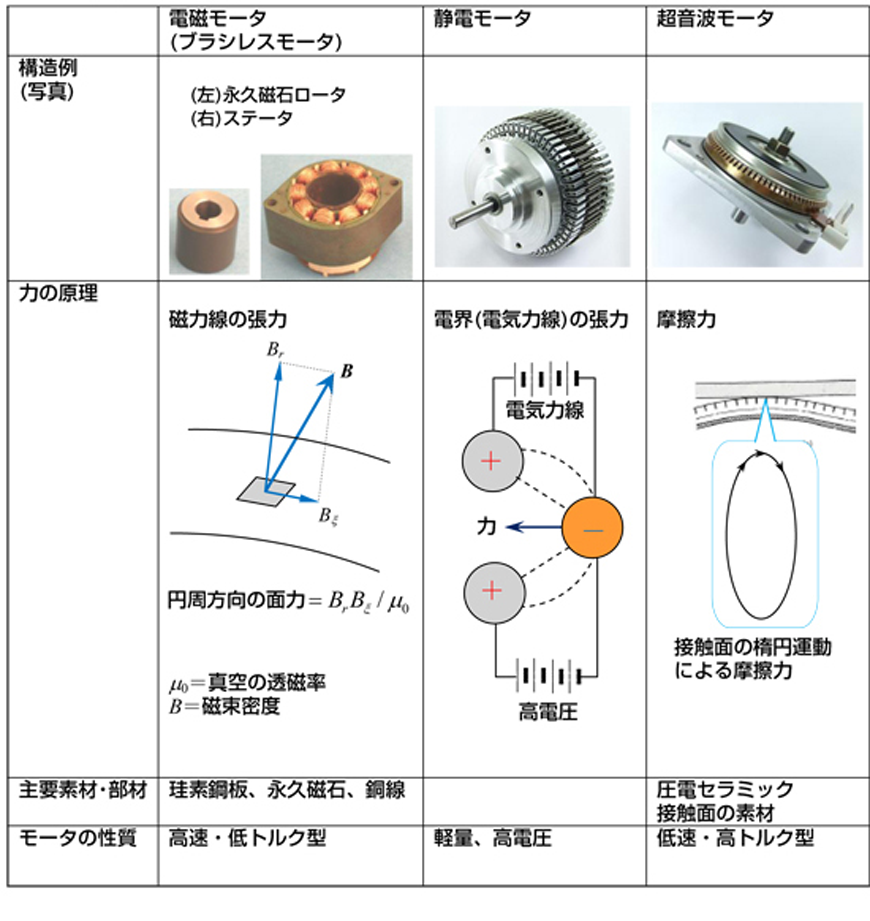
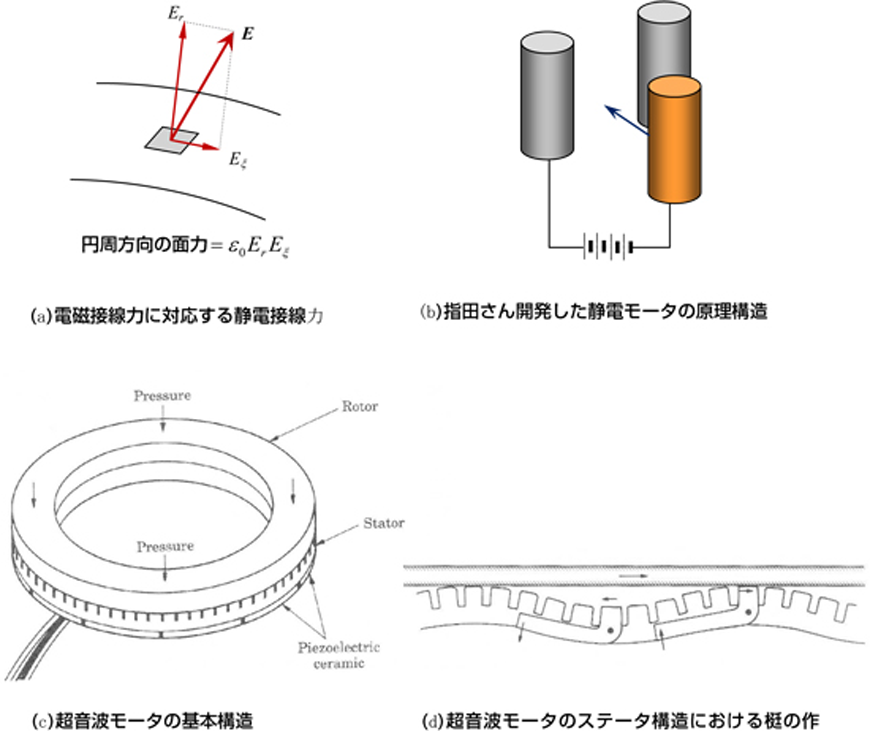
3種類のモータの比較の一覧表が表1です。電磁モータの代表として、永久磁石を使うブラシレスモータを取りあげています。また、静電モータにもいろいろあるのですが、ここでは実用化されている指田さんの開発品を取り上げています。
電磁モータの力や回転力の原理の説明法はさまざまあるのですが、ここでは永久磁石ロータの表面に入る磁力線を垂直から少し傾かせることによって、磁石の面に磁力線による接線力が作用するものとして説明します。接線力は半径方向成分と接線成分
の積に比例します。ステータの巻線に流れる電流によってこの接線成分が発生するものと理解しましょう。
電磁モータに比べると静電モータの利用はまだ進んでいない理由の一つは、プラスとマイナスの電極間に高い電界をかけなくてはいけないためです。高電圧のために空中では絶縁が破れて放電したり、塵が集まるという欠点があります。よって真空中で使うモータとしての用途開発が研究されています。
3種類のモータの類似点と相違点
電磁モータと静電モータの類似点は、真空あるいは空隙を通してトルクがはたらくことです。それに対して超音波モータは表1の右欄の構造図に示すようにロータとステータの面同士を接触させて摩擦力を利用します。
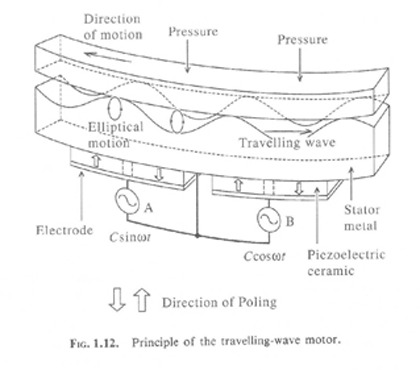
静電モータと超音波モータの共通点は磁界を使わないことです。超音波モータでは電界によって伸縮する圧電素子を使うため、基本的な性質に静電モータに似ているところがあります。圧電素子(piezoceramics)とは磁器(セラミックス)の一種であり、大変に硬い絶縁物でありながら、これに電圧を加えるとわずかではあるが伸び縮みします。これを利用して金属リングの表面に楕円運動を発生させることができます。図1(c)の補足図は、超音波モータの基本構造のなかで薄い圧電素子が使われている様子を示すものです。印加電圧の周波数を超音波領域にして金属を共振させると変位が大きくなり、単なる伸縮ではなく波動をつくりだす方法を指田さんは発見したのです。リング状のステータ金属に刻みを入れてあるのは、これは図1(d)に示すように、楕円運動の接触面の←→の動きを大きくするためです。
今回の歴史コラムに記したように、シュタインメッツは、ビスマルクの政権から睨まれて、スイスに逃亡してETH(連邦工科大学)で大学の単位を修得した後に、身を隠すようにアメリカにわたり、やがて才能を開花させました。送電に使うトランスで起きるヒステリシス損失の理論から、磁気ヒステリシスが損失だけでなく、交流モータに活かすとトルクを発生することを発見したのだと思います。
図2は2組の圧電素子AとBにそれぞれと
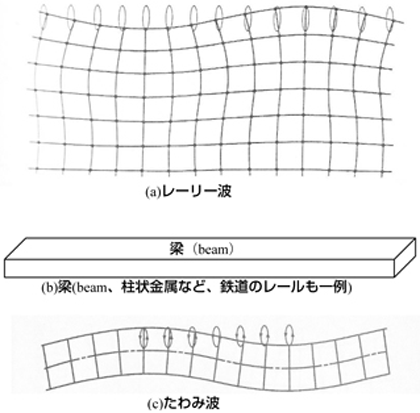
の2相交流電圧を印加すると、リングの表面を時計方向あるいは反時計方向にまわる横波と縦波が発生する原理図というよりも概念図です。これは指田さんの発明の思考プロセスにおいて、レーリー波を想起したことを意味するイラストでもあります。レーリー波は地震の揺れのように、地表や厚い金属の表面に現れる波動であり、図3にその意味を描いています。現在の超音波モータは薄い金属に伝搬するたわみ波を利用しています。
MEMSについて
小さな電磁モータのことをマイクロモータと呼ぶことがあります。それはロボットの手指を駆動するモータ、腕時計の針を駆動するモータ、携帯電話のブザー用として振動を発生させるモータなどです。しかし直径や長さが1㎜以下のものを制作するのは困難ですし、巻線ができたとしても効率は低いです。それに対して静電モータは小さくしても効率が下がりにくいのが特徴です。極微の静電モータはMEMS(メムズ,Micro Electro Mechanical Systems)として注目され大きな産業になろうとしています。MEMSは半導体をつくる方法でシリコンを素材として作られます。駆動電圧もそれほどには高くしません。
MEMSは回転運動の用途よりも、静電アクチュエータとしてインクジェットプリンタのヘッド部にある微小ノズルや、圧力による変位によって電圧が発生することを利用して、圧力センサー、加速度センサー、流量センサー、HDDのヘッド、小さなミラーの制御で光路を切り替える光スイッチなどへ応用されています。
超音波モータの特徴
超音波モータは、機械的な摩擦を使うために連続運転では寿命に限りがあります。そのために非連続運転に用途を見出して、次の5つの特徴を利点として利用しています。
(1)歯車不要で低速・高トルク。高い応答性
(これに対して、電磁モータでは効率を上げるのに高速低トルクモータとして設計して、必要に応じて歯車などの減速機構によって低速高トルクとする。)
(2)静か
(歯車などの減速機構がなく、振動が超音波領域なので静粛。)
(3)小型に有利、軽薄短小
電磁モータは小型になるほど効率が低くなるのに対して、超音波モータでは小型でも高い効率が原理的に得られる。)
(4)強磁界の影響を受けない
(医学機器MRIの造影剤注入アクチュエータとして最適)
(5)中空構造が可能
(カメラのオートフォーカス(自動焦点機構)に適している)
3種類のモータの比較
2010年ごろのことですが、指田さんの会社(新生工業)を訪ねて3方式のモータの特長について論じたことがあります。そこでNIDECモーター基礎研究所で私どもが開発したF5B用ブラシレスモータのことも話題になりました。

24V電源で300Aの電流を 供給することもある。
動力用など大型中型モータでは電磁モータが圧倒的です。では、小型で高出力ではどうだろうか? 1976年に指田さんが超音波モータを発明するきっかけとなったのがこの課題でした。今からほぼ40年前の小型の電磁モータの出力は低かったのです。現在の超音波モータの前に指田さんが発明したのが、図5に示す構造のクサビ型超音波モータでした。これは当時としては強力なモータでした。
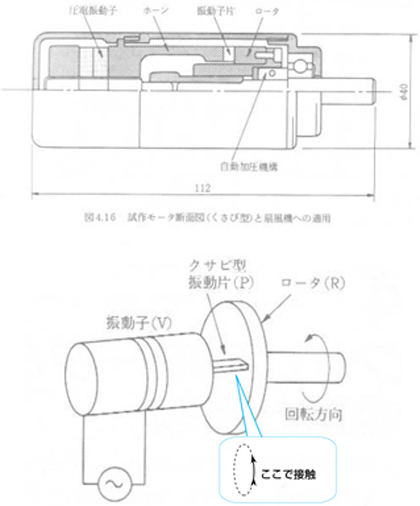
振動子片(クサビ)の先端を超音波周波数で楕円運動
させて図示す区間だけロータ円盤に接触させる。
限界設計で比較すると、重量対出力では電磁モータが超音波を超えていると思います。指田さんが静電モータに次の情熱を注ぎ始めた理由の一つは連続運転での軽量モータの実現でした。電磁モータは磁界を通すための鉄心と電流を通すための銅が重量を大きくします。静電モータは素材の使い方において原理的に軽量化可能です。
電磁モータも超音波モータも真空では使いにくいモータです。電磁モータでは巻線や鉄心で発生した熱を除去しないとモータは正常に動作をしません。冷却が必要ですが簡単なのが風を当てることです。真空ではこれができません。真空中では金属同士が接触すると結合することがあります。超音波モータでは金属と摺動剤が接触するので、真空中でも正常な動作をする素材の選定が容易ではありません。
静電モータの特長は発熱する部分が少ないことです。つまり、効率が高いモータです。
以上を総括すると次のことが言えます。
(1)モータには豊富なタイプがあるが、圧倒的に種類(種々の特質)が多いのは電磁モータである。
(2)電磁モータを補う形で超音波モータと静電モータがある。ただし実用化されているタイプは多くない。
(3)超音波モータは減速機構を使わずに低速高トルクが瞬時に必要な用途に適する。事例がカメラの自動焦点機構。また強磁界のもとで必要なアクチュエータとして最適。事例がMRIの造影剤の注入装置(インジェクター)。
(4)静電モータは真空で使うモータとして適している。
最後に
指田さんが超音波モータを発明しようとしたきっかけは人の手のアクチュエータやロボットのための小型で強力なモータが無かったことです。超音波モータはできましたが、ロボットの手指用のモータはまだできていません。
手指のアクチュエータの実現にはそれをライフワークとする天才的な科学者の出現が待たれます。次回は半導体素子の発達が新しいモータを生み出したことを見ようと思います。そのあとの課題として手指のアクチュエータを取り上げたいと思います。

(1990年頃の撮影)
筆者のモータ人生で出会った中で並々ならぬ執念の持ち主と感じたのは、NIDECを創立した永守重信氏と超音波モータを発明して事業化した指田年生氏である。1983年の小形モータ技術シンポジウムでこの2人がスピーカとして登場したとき、300人を収容するそれぞれの会場は満員の熱気にあふれた。産業史を調べると、ある国が栄えているときには必ず優れたモータの発明家と事業家がいた。日本のモータ史においてはこの2人が象徴的な人物である。
このシンポジウムの企画委員長として1981年に芦花公園の向かいで環状8号線沿いの新生工業にお邪魔したとき、「本物の物理学者に出会った」と思った。楔形と彼が命名したモータが勢いよく扇風機のプロペラを回すのをみせていただいた印象は強烈だった。翌年の二度目の訪問では進行波型と名付けた新機種を見せていただいた。物理の教科書にでてくるレーリー波の縦波と横波の現象の考察を経て、材料力学で学ぶ梁の波動をさらに洞察し、圧電素子によって回転電界を発生して回転波動を作りだす発想は技術者のレベルを超える頭脳力だと感じた。電磁誘導を発見したファラディと人物像が重なった。
このモータの製造のためには精密な機械加工作業が必要不可欠のはずだが、指田さんの開発室は古い木造の2階にあってひっきりなしにとおる大型トラックのために床が揺れていた。そこではラッピングマシンが平な面を出すために動いていた。指田さんが仰るには「精密なものを作るためのツールは必ずしも精密でなくてもよい。人類が精密なものを作りあげてきた歴史がこれを語っている。」彼は不必要なものに経費をかけないことにも心がけていたのだ。
2010年、会社の玄関だけでもと思って改装を始めたところ、柱がボロボロになっていた。世界に一社の医療機器用の超音波モータを製造できるメーカーの責任が果たせなくなってはいけない。そこで指田さんは決心して地下一階地上三階の新社屋を建設した。