製品情報
ロボット製品
ニデックインスツルメンツの特殊ロボットについてご説明いたします。
私たちニデックインスツルメンツは世界中に、半導体ウエハ搬送ロボットと液晶・OLEDガラス搬送ロボットを提供しております。それらロボットの駆動源であるモータは自社開発しております。
半導体ウエハ搬送ロボットは、超低振動・高速・省スペース・高効率搬送を実現しております。さらに顧客特有のカスタマイズ要求にも対応しております。例えば、真空対応・高温対応・耐薬品性対応などの実績が数多くあります。
ガラス搬送ロボットは、サンキョーが築き上げた超低振動制御技術などのコア技術が認められ現在世界シェア80%を獲得しデファクトスタンダードの地位を築いております。最大3m角を超えるガラス板でありながら厚みは1mm以下です。このガラス板をフォークで持ち上げ運ぶ時にガラス板は大きくたわみます。搬送中にロボットに振動が発生するとガラス板がさらに大きく揺れて割れてしまいます。ニデックインスツルメンツは、搬送ロボットの振動を完全に抑えることを実現し、お客様に高効率生産の実現を提供しております。
ニデックインスツルメンツは、新しいロボット開発プロジェクトを立ち上げております。それは、PLPガラス搬送ロボットです。FO-PLPガラス搬送ロボットでは、半導体ウエハ搬送ロボットとガラス搬送ロボットの2つの最先端技術の融合をはかりました。その結果、FO-PLPプロセスに最適な専用組み込み搬送ロボットの開発に成功しました。
巨大ガラス搬送ロボットで世界1を獲得した先進的制御技術とは
ニデックインスツルメンツは1995年に液晶ガラスを搬送するロボットを開発し市場参入しました。現在、液晶ガラス搬送ロボットで80%超の世界市場シェアを獲得しています。この実績を大きく後押ししたニデックインスツルメンツの固有技術を紹介します。
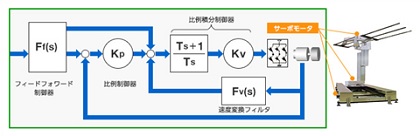
従来、ロボット制御には主にPID制御と呼ばれる制御アルゴリズムを使用しています。それは制御系が満たすべき目標値と実際の制御対象の挙動値との誤差をP(比例)・I(積分)・D(微分)という3項目の動作フィードバックを行い修正する方法です。これは、制御対象に対する厳格な検証を経ずに設計し、制御テストをくり返しながら制御パラメータを調整していく方法です。航空機の自動操縦をはじめ、加熱炉の温度調整、モータや油圧システムなどの各種機器・自動車・石油化学・電力などのさまざまな業種で独自進化を遂げながら使用されています。しかし、制御系が大規模化・高精度化、多様化していく中で、PID制御では仕様を満たせないケースが生じてきました。1995年ガラス搬送ロボットに参入した当時のガラスサイズは、360×465mm(G2)の大きさでした。その後、液晶市場の拡大に合わせてガラスサイズは飛躍的に拡大し、2004年には1500×1800mm(G6)の大きさになりましたが、ガラスサイズは大きくなる一方で厚みは、当初2mm以上であったものが1mm以下に薄くなっていきました。
その結果、ロボットが大きなガラスをすくい上げるとガラスの両側には垂れが発生するようになり、ロボットの搬送中に発生するほんのわずかな振動がガラスに伝わりガラス破損を起こす問題が頻発するようになりました。この問題を解決するために、ニデックインスツルメンツは、PID制御方式によるロボット制御を止め新しい制御方式の開発に着手しました。
私たちは、新しく開発するロボット駆動制御の技術要件を以下のようにとらえました。
① 閉ループ特性:低くなった機械共振に適合した閉ループ特性
② 外乱応答特性:大きな負荷変動や外乱に対しても安定して動作するロバスト性
③ 指令応答特性:効率向上のための指令応答特性の飛躍的向上
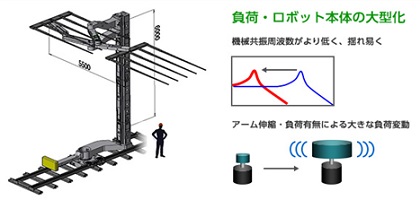
ガラスサイズの拡大に合わせて私たちが提供するロボットも大型化しており、搬送中に発生する固有振動もそのサイズ変化に合わせ将来も変わり続けることを前提としました。さらに、液晶ガラス搬送には多くの搬送仕様があり、それぞれの搬送パターンにより制御動作に対して異なる負荷や外乱変化が発生することも前提としました。そして、大きなガラスであっても高速かつ位置精度高く搬送する必要があります。私たちは、従来のPID制御のようなパラメータ調整型制御ではこれら要求を解決できないと結論を出しました。
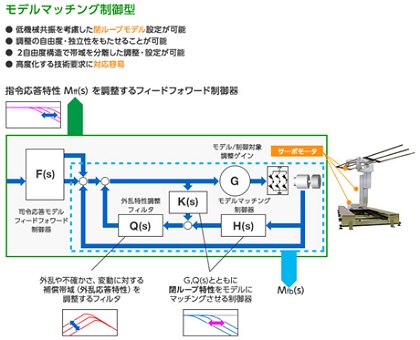
そこで、私たちは制御対象を数学的に表現し、そのモデルに合った制御アルゴリズムを設計するという先進的制御理論に基づいて新たな制御方法を開発しました。しかも、ロバスト制御の観点から、制御対象の詳細なモデル化ではなくラフな数式モデルで表現することとし、そして不確かさと変動を設定した周波数帯域でロバスト性を発揮する外乱補償機能によって安定化させる方式を考案しました。その方式のもと、閉ループ特性を機械特性に応じた希望モデルに合わせ、さらにフィードフォワード制御により指令応答特性を刷新しました。
そうして、モデルマッチングさせ閉ループ特性に基づくフィードフォワード補償をかけることで指令応答特性も設定が自由となり、負荷変動や外乱に強くかつ制振と高速性の両立を実現した新しいロボット制御アルゴリズムの開発に成功しました。私たちはこの方式を『モデルマッチング制御方式』と呼びPID制御では解決することができない最新技術としてニデックインスツルメンツのガラス搬送ロボットにすぐさま採用しました。
10.5Gすなわち3m角を超えるガラス搬送が始まった時、私たちは完璧と思っていたこの制御方式でも巨大ガラス基板搬送に求められる制振性と高速制御要求には不十分であることを自覚しました。そして私たちはモデルマッチング制御方式をさらに飛躍させるべく開発に取りかかりました。
その頃すでにニデックインスツルメンツは液晶ガラス搬送ロボットにおいて80%以上の市場シェアを有していましたので豊富な経験をもとに、なぜ3mを超えると完璧であるはずのモデルマッチング制御方式でも十分と言えないのか。モータメーカとしてモータ制御については追い込んでいる自負がありましたが完ぺきではなかったのです。
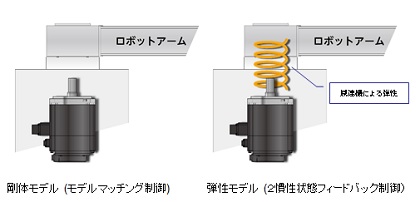
3mを超えるサイズのガラス基板を搬送する時、なぜ抑えたはずの振動が発生するのか私たちは解析をしました。 『減速機だ!』 ロボットは駆動部であるそれぞれのモータに減速機を取り付けて制御しています。それら減速機では小さな値でありますが、弾性が発生していることがわかりました。あまりにもロボットが大型化したため、減速機の剛性が十分に確保できず、減速機がばね成分を発生させていることを突き止めました。巨大ロボットでは『モデルマッチング制御方式』でも不十分であると判断しました。 そこで、私たちは3mを超えるガラス基板を搬送する巨大ロボットに適合した制御アルゴリズムの開発に着手しました。ガラスサイズは大きくなり厚みはさらに薄くなっています。そして、振動を抑えながら高速で搬送し高い位置決め精度で停止することを目標としました。
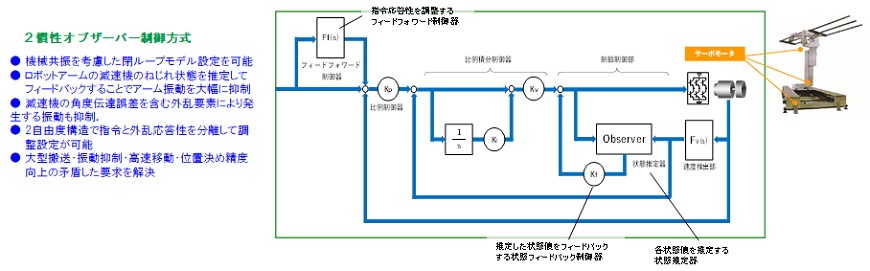
こうして、わたしたちは巨大ロボットで振動を抑制する新しいアルゴリズム『2慣性状態フィードバック制御方式』を開発しました。 この新しい制振制御方式は以下のような特長があります。 ① 機械共振を考慮した閉ループモデル設定を可能とする ② ロボットアームの状態を推定しフィードバックすることでアーム振動を完全に抑制する ③ 減速機の角度伝達誤差まで含む外乱要素により発生する振動も抑制する ④ 大型搬送・振動抑制・高速移動・位置決め精度向上の矛盾した要求を解決する
新しい制御理論は、動力伝達系(減速機)の先端にあるロボットアームの移動速度と減速機の弾性により発生するねじれ角度をフィードバックしロボットアームの振動を限界まで抑え込むことを狙いました。ロボットアーム先端の移動速度と減速機の弾性により発生するねじれ角度は測定不可能でした。状態オブザーバー方式をベースにその問題を解決しました。そしてアーム伸縮による慣性モーメントの差や、搬送対象物の重量差(10kg~150kg)にも影響をうけることなく振動を抑制することを求めました。
この『マルチオブザーバー制御方式』を搭載した巨大ロボットは直ちに現場に投入されました。その後、私たちは巨大ロボットにおいても世界シェア80%超をゆるぎないものとしており、その理論・アルゴリズムが正しかったことを証明しました。
今、この革新的制御技術を他のロボットで活用していく開発が進んでいます。それは、PLPガラス搬送や、半導体ウエハ・テープフレーム搬送で使用するロボットで活用するものです。PLPガラス搬送では、ガラスサイズは液晶と比較すると小さいものの、PLPプロセスの影響や搭載されているICチップの重量によりPLPガラスに大きな反りが発生します。FOUPなどの挟ピッチカセットからPLPガラスを出し入れする時に、ロボットアームやPLPガラスの干渉問題を起こさないためにはロボットアームに対して高い制振性が求められます。半導体テープフレーム搬送は、半導体ICチップの重みでテープ部に大きな垂れが発生します。アームを伸ばした状態で狭いピッチのカセットにそのテープフレームを収納する際に、アームの振動を抑えることが強く求められます。 ニデックインスツルメンツが液晶ガラス搬送ロボットで開発し数多くの実績を重ねてきた先進的な制御技術は、高速搬送と極限を目指した制振性を実現することで、このような新たな半導体搬送の要求に対しても十分にこたえることができるものと考えております。
FO-PLP製造工程
半導体パッケージング工程に大変革を起こしたFO-PLP生産をニデックインスツルメンツは強力にサポートします。
FO-PLPの生産方法は、Mold firstとRDL firstの2つに大別できます。Mold firstでは、face-downとface-upに大別できます。いずれもパターニングが完成した数多くの半導体チップをCarrier上に並べ、後工程プロセスを実行するものです。最も普及しつつあるRDL firstでは、Carrierにガラスを使用します。工程間はPLP専用FOUPにガラスCarrieを収納して、PLP専用Load Portに搬送されます。Load Portでは、FOUPドアを開けEFEM内のガラス搬送ロボットがGlass Carrierを1枚づつ取り出しプロセス装置へ搬送します。
PLPガラスCarrier搬送時の問題点
ガラスCarrierに多数の半導体チップが搭載されます。PLP工程内にはモールドなど複数のプロセス工程が存在します。プロセス工程の影響と半導体チップの重みによりガラスCarrierに大きな反りが発生しますが、工程や搭載される製品ごとに反りの特性が異なります。ガラスCarrierをFOUPに出し入れする時、ロボットフォークやすくい上げたガラスCarrierが他のガラスCarrierに対して干渉しトラブルを発生させる可能性があります。
私たちは、液晶・OLEDガラス搬送ロボットにおいて世界1位の市場シェアを獲得しています。このガラス搬送においても反りとロボットフォークの振動が問題でした。その問題を我々の独自制振制御と高速搬送技術で解決しています。ニデックインスツルメンツは、長年作り上げてきたこのガラス搬送技術により、PLPのガラスCarrier搬送の問題を解決し、皆様に高品質・高スループット生産をお届けします。
FO-PLP関連SEMI規格
PLP Carrierサイズは、510×515mmと600×600mmの2つをSEMI規格に制定予定です。
PLP関連では、以下のような複数のSEMI規格を開発中です。
PLP Glass Carrier:現在開発中
PLP Glass Carrier ID Marking:現在開発中
PLP FOUP:現在開発中
PLP Load Port:現在開発中
なお成立したSEMI規格は以下のURLで確認することが可能です。
日本語URL:http://www1.semi.org/jp/node/61402
英語URL:https://www.semi.org/en/Standards/StandardsPublications
協力:
PLP Glass carrier 提供 AGC株式会社様
PLP FOUP提供 信越ポリマー株式会社様
製品詳細情報
液晶・OLEDガラス・FO PLP搬送ロボット
| 対応基板サイズ | 機種シリーズ名 | データシート | 大気/N2 | 真空 | 特長 |
| 10.5世代 (2940mm×3370mm) |
SR95 Series | ◆ | ● | ||
| SR8670 Series | ◆ | ● | TH軸回転機能搭載、旋回半径を最小化実現 | ||
| SR8673 Series | ◆ | ● | スライダー駆動方式、高精度直進性実現 | ||
| 8.6世代 (2250mm×2600mm) |
SR99S Series | ◆ | ● | ||
| SR8670 Series | ◆ | ● | TH軸回転機能搭載、旋回半径を最小化実現 | ||
| SR8653 Series | ◆ | ● | スライダー駆動方式、高精度直進性実現 | ||
| 6世代 (1500mm×1850mm) |
SR9145 Series | ◆ | ● | テレスコピックType(ショートZ軸対応) | |
| SR99L Series | ◆ | ● | 支柱Type(ロングZ軸対応) | ||
| SR8651 Series | ◆ | ● | Arm駆動方式、旋回半径最小化実現 | ||
| 4.5世代 (730mm×920mm) |
SR9143 Series | ◆ | ● | テレスコピックType(ショートZ軸対応) | |
| SR9183H Series | ◆ | ● | 支柱Type(ロングZ軸対応) | ||
| SR8651 Series | ◆ | ● | Arm駆動方式、旋回半径最小化実現 | ||
| 2世代 (360mm×460mm) |
SR9143 Series | ◆ | ● | テレスコピックType(ショートZ軸対応) | |
| SR9148 Series | ● | テレスコピックType(ショートZ軸対応) | |||
| SR9183H Series | ◆ | ● | 支柱Type(ロングZ軸対応) | ||
| SR8651 Series | ◆ | ● | Arm駆動方式、旋回半径最小化実現 | ||
| FO PLP (510mm×515mm) (600mm×600mm) |
SR9148 Series | ● | EFEM用 | ||
| SR9183H Series | ● | EFEM用(多段装置対応) | |||
半導体ウエハ搬送ロボット
| 型式 | SR8230 | SR8220 | SR8240 | SR8241 | |
| 適用ウェハーサイズ | 200,300mm | 200,300mm | 200,300mm | 200,300mm | |
| 基本構造 | 円筒座標型シングルアーム | 円筒座標型ダブルアーム | 3リンク式水平多関節 | 3リンク式水平多関節 | |
| 動作自由度 | 3 | 4 | 5 | 5 | |
| 動作 範囲 |
アーム伸縮 | R軸:標準アーム -212 ~ +321 mm /オプション (ショートアーム) -265 ~ +245 mm (ロングアーム) -319 ~ +447 mm |
R1軸:標準アーム -212 ~ +321 mm /オプション (ショートアーム) -265 ~ +245 mm (ロングアーム) -319 ~ +447 mm |
X軸:-432 ~ +432 mm | X軸: -650 ~ +650 mm |
| - | R2軸:標準アーム -212 ~ +321 mm /オプション (ショートアーム) -265 ~ +245 mm (ロングアーム) -319 ~ +447 mm |
- | - | ||
| アーム旋回 | TH軸:340deg | TH軸:340deg | TH軸:±180deg | TH軸:±170deg | |
| 上下 | Z軸:標準300 mm/オプション400,450,500mm | Z軸:標準300 mm/オプション400,450,500mm | Z軸:300 mm | Z軸:300 mm | |
| 手首回転 | - | - | Roll1軸:±240 deg | Roll1軸:±275 deg | |
| - | - | Roll2軸:±240 deg | Roll2軸:±275 deg | ||
| 最高 速度 |
アーム伸縮 | R軸:5.76 rad / sec | R1軸:5.76 rad / sec | X軸:1680mm / sec | X軸:1709mm / sec |
| - | R2軸:5.76 rad / sec | - | - | ||
| アーム旋回 | TH軸:6.98 rad / sec | TH軸:6.98 rad / sec | TH軸:8.72 rad / sec | TH軸:6.54 rad / sec | |
| 上下 | Z軸:450 mm / sec | Z軸:450 mm / sec | Z軸:450 mm / sec | Z軸:700 mm / sec | |
| 手首回転 | - | - | Roll1軸:9.42 rad / sec | Roll1軸:9.42 rad / sec | |
| - | - | Roll2軸:9.42 rad / sec | Roll2軸:9.42 rad / sec | ||
| 繰り返し精度 | ±0.1 mm | ±0.1 mm | ±0.1 mm | ±0.1 mm | |
| クリーン度 | ISOクラス1 | ISOクラス1 | ISOクラス1 | ISOクラス1 | |
お問い合せ先
ニデックインスツルメンツ株式会社
メールでのお問い合せ
お電話でのお問い合せ
03-5740-3000
受付時間: 9:00~17:30(土日祝除く)