马达的协调控制技术
具有内置小型计算机的Intelligent Motor™可通过无线网络进行远程通信,从而实现实时的、高精度的协调控制。
近年来,随着物联网(IoT :Internet of Things)的普及,各种各样的机器人可以通过无线网络进行远程控制。另外,在市场有望扩大的机器人产业中,需要从利用机器人单体的作业发展为与多个机器人协作的工作。
然而,当尝试通过无线网络对需要高精度实时控制的机器人进行远程协调控制时,由于来自机器人的数据和控制指令因通信延迟而不能及时到达,因此无法实现精确的协调控制。
作为与NEC的一项开放式创新,NIDEC(尼得科)通过将该公司持有的无线通信技术与NIDEC(尼得科)的马达同步技术相融合,实现了实时的、高精度的机器人协调控制。
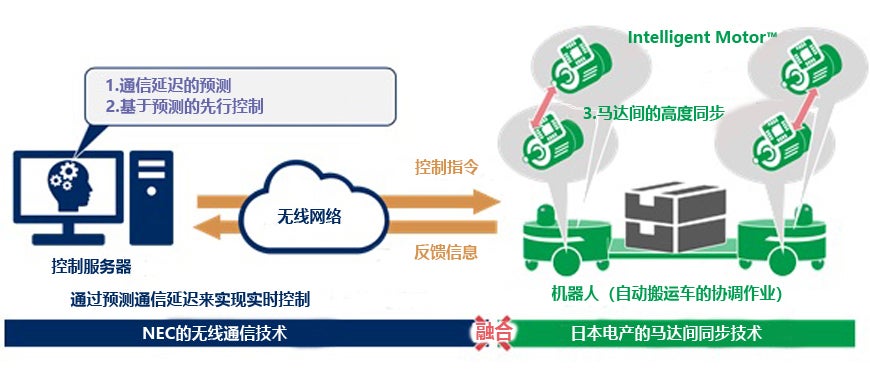
在这种使用无线的智能马达的协调控制中,发现了在诸如Wi-Fi、LTE等各种无线网络中出现延迟的高精度概率模型,并使用该概率模型实现了通信延迟预测(注3)。

通过这种通信延迟预测技术,能够预测从Intelligent Motor™反馈的信息(位置、速度、扭矩等)传递了多长时间、并能够预测向Intelligent Motor™发送的控制指令(位置、速度的指令)会延迟多长时间到达。
通信延迟预测能够在控制指令到达时准确地推定Intelligent Motor™的状态,并基于所推定的未来状态进行先行控制(注4),能够实现包括通信延迟在内的远程实时控制。

通过使具有这些特征的通信技术与内置有小型计算机的NIDEC(尼得科)的Intelligent Motor™技术同步,将多个Intelligent Motor™之间紧密连动,实现了高精度的同步以及搭载有Intelligent Motor™的多个机器人的协调控制。并且,取消了传统的机器人所需的昂贵的控制用计算机。其结果是,例如在工厂或仓库的搬运业务中,可以通过组合并协调多辆低成本的小型自动搬运车而不是昂贵的大型自动搬运车来搬运各种形状、重量的货物,有利于降低运营成本。

作为本技术的应用实例,例如工厂、仓库中的自动搬运车、保安机器人、发生灾害时的调查机器人、用于检查或配送快递的无人机的远程控制等,正在推进应用于各种领域的社会系统的实证和产品化进程。

———————————————
((注1)Intelligent Motor™
由NIDEC(尼得科)制造的、内置有小型计算机的马达。该马达可以通过无线网络轻松地进行控制,还可以获取例如位置、速度、扭矩等各种马达信息。
((注2)搬运效率
远程控制自动搬运车并以不偏离指定路线的方式进行搬运时所需的时间
((注3) 通信延迟预测
用高延迟状态和低延迟状态这两种状态来定义通信网络,并发现可以使用某分子的高能态和低能态之间的状态转移的概率模型来高精度地预测这两种延迟状态的转移模型。实证得出,在实际的网络环境中,与最新的同类研究成果相比,预测误差约改善30%。
((注4) 先行控制
对控制系统的未来状态进行预测和控制的手法。
“Intelligent Motor™“为NIDEC(尼得科)株式会社在日本的注册商标。