モータの不思議と更なる可能性の探究
第十九回 航空・宇宙に使われるAvionic Motors
前回(18)には磁気浮上をとりあげてみました。そこでは磁気に関連する場合でしたが,広い意味での「浮上」の科学技術領域として航空・宇宙があります。これは幅広く奥深いハイテクモータの領域でもありそうです。Avionicsというコトバは私共にはまだ馴染みがないかもしれませんが,これを航空宇宙分野のエレクトロニクスと捉えます。真空管に代ってトランジスタが使われるようになった1960年代からこの分野で使われるようになった技術用語です。
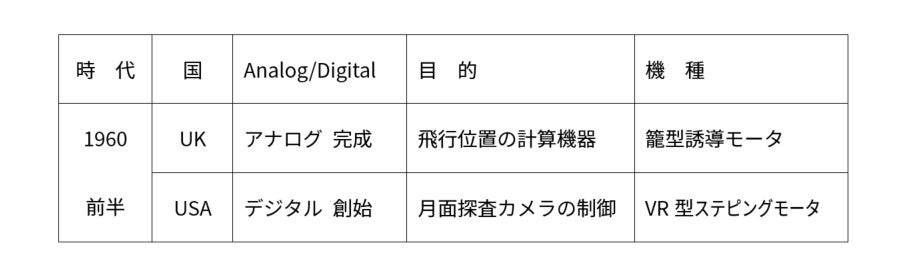
今回は1963/4年当時の航空宇宙分野の最先端の2つの制御モータの設計を取りあげ,60年後の現代の技術を最終回のテーマとして締めくくろうと思います。今回のひとつは英国の象徴的なHawker Siddeley グループで生まれたVTOL Harrierの場合であり,2つめは米国の月面探査機です。前者のモータを設計したColin McDermottさんと後者の江川克己さんを偲びながらの執筆になります。VTOLとはVertical Take-Off and Landing Aircraft の短縮語で垂直離着陸航空です。
モータに関して不思議を覚えることがしばしばあります。まず,モータのタイプやその設計を論じるときに,永久磁石を使うのか使わないのか?これに言及します。ここにとり上げる事例はこれを使わない2つのタイプですが,それぞれの事情が異なります。Harrierでは姿勢制御に関与する交流サーボモータ(位置決めモータ)であり,1960年代初期でもアナログ半導体素子による精密な直流増幅回路が困難だったので,交流電源で作動する誘導モータ式の位置決めモータが使われました。第14/15回でも論じたように,これは永久磁石を使わないことを利点にしたモータです。他方の月面探査用モータの場合,月面の磁場を乱す可能性を排除するために永久磁石の持ち込みが禁止されたのです。これら2件はどちらも位置決めモータの物語ですが,一方はアナログ制御であり他方はデジタルです。お二方ともにモータ本体の設計が仕事でしたからでしょうか,制御装置がまだ真空管だったのかトランジスタが使えられたかどうかを話題にすることを忘れていました。ちなみに,民間を象徴するのがテレビであり,真空管から半導体素子への転換が当時の大きな事業でした。
二人のエンジニア
お二人は地球上の場所は異なっても,同世代のengineerでした。バイオリニストでもあったMcDermottさんの経歴は第9回に掲載してあります。
日本では1945年の終戦以降の10年あまり,米国のトランジスタ技術や制御技術を取り入れる国家的な事業を推進した一人が東北大学の渡辺 寧(やすし)でした。1953 年に渡辺教授が自動制御を講義したとき,江川さんはその講義を熱心に聴く一人でした。卒業研究には交流モータの磁界の様子をオシロスコープに描かせるテーマを選びました。卒業して山洋電気に入ると2相サーボモータの設計が仕事でした。それは当時の制御用モータの主流でありアナログ制御でした。まもなくして彼と上司を驚愕させたのが米国のある技術誌に掲載された数値制御工作機器とそれに使うVR型ステッピング・モータでした。後述するように,このタイプのステッピング・モータの起源は英国にあったのですが,米国の起業家は欧州よりも日本の工業力の成長に目を向けていました。米国で設計された精密モータを試作製造する日本企業を探索し育成しようとしたのです。ロサンゼルスのIMC Magneticsの社長が来日したとき,彼は技術通訳をした江川さんの天賦の才能を察知しました。その縁で江川さんが渡米して,IMCでシンクロと呼ばれる航空機用モータとステッピング・モータの設計を開始したのは1963年です。
彼の後輩である自分のモータ史も少しだけ書かせてください。1960年,東北大学電子工学科3年生での福島弘毅教授から受けた電気機器学の講義から始まります。教授は東京大学出身の俊才の風格を宿し講義は流暢でした。全15回の講義の初回ではトランスやモータの巻線の相似則に美しさを感じました。最終回の講義では教授が特殊モータの一つとしてヒステリシスモータをゆったりと語り始めました。すると,磁気ヒステリシスが自起動式同期モータを生み出す原理が,コロコロと快音を伴って頭に収まったのです。1964年,TEAC(高級テープレコーダのメーカ)で,2速度ヒステリシスモータの巻線決定の手法をほぼ確立したとき,より重要な磁鋼の B/H 特性と極数の関係など物理的な事柄に関心を向けました。翌年,解析計算と実験結果を拙い英語で発信すると,インドの政府機関とスコットランドのFerranti LimitedのMcDermottさんからresponseがありました。(ヒステリシスモータが,音響機器だけでなく,飛行機や大陸間弾道弾の姿勢制御にとって重要な精密モータでもあったのだ。)これが機縁となって筆者は英国の企業と大学のモータ技術者に加えてOxford University Pressと交流をもつようになりました。
図19-1 は1964年ごろから配備されるようになったVTOL Harrierです。ジェットエンジンで垂直離陸する戦闘機です。この飛行機の姿勢と位置の制御に使われたのが 図19-2 の写真の籠型誘導モータです。McDermottさんはRoyal Air Forceのパイロットをめざしたのですが夢叶わず,Manchester大学で電気工学を学び,1953 年にBristol大学での研究助手のポストをえて,さらに可変速誘導モータの研究を経て1957年にFerrantiに入社しました。そしてこのモータの開発に携わりました。この誘導機の特徴はY字型の歯と集中巻きで,400Hzの2相交流によって駆動・制御されます。Y字集中巻きの民需として筆者が知る事例は2つあっていずれも天井扇です。一つはこの方式の誘導機であり,60Hzの2相交流を使うもので北米の家庭用です。1970年代後半,(米国ではジャイロに代わって,レーザと相対性原理を使う慣性航法を実現していたのですが)英米の協定によってVTOL Harrierの技術が米国に渡ったことが背景にありました。この企画に参画した技術系軍人が退役後に,このモータを60Hz用にして廉価な素材での扇風機できる発想を得たようです。この情報を真剣に巧みにとらえたのが台湾の台中市のモータ企業集団でした。一社ではなく共同での設計・製造でした。北米の家庭に設置された空調機の効果を活かすための低速天井扇でした。これは軍事技術が民需に転換された好例です。もう一つの事例は永久磁石の利用によってブラシレスモータとして電力効率を上げたもので用途はインドの家庭用です。


アナログからデジタル制御へ
1950年代から米国では航空宇宙の基礎技術が準備されていました。1961 年5月,ケネディ大統領がアポロ計画を発表し,1970年以前に人類を月面に着陸させると宣言しました。有人着陸に先立つ月面探査がSurveyor 計画です。ロサンゼルスで江川さんの評判が伝播すると,ジェット推進研究所から難題がもちこまれました。宇宙船の垂直上昇のときの激しい衝撃や宇宙空間での寒暖の差に耐えるなど厳しい条件下で機能する観測機器用モータを短期間に作ってほしいというものでした。
今回,航空宇宙領域に使われるモータとしてとりあげている2件は,1960年代前半の英米の最先端技術です。共通点は航空機用2相サーボモータにあります。2相サーボモータは,第14回にとり上げた籠型誘導機の1つのタイプであり交流モータです。江川さんの場合はスロット数が少ない交流サーボモータのステータの鉄心を流用して,月面探査装置のミラーをデジタル駆動するステッピング・モータを実現しました。地球からの電波でモータの回転を操作するにはアナログでは不可能でした。このモータの原理構造は英国の国防設備である軍艦に搭載するために発明されたものです。
McDermottさんの2相サーボモータの構造は複雑であり,回転磁界として知られるアナログ的な駆動をする籠型誘導モータの究極の姿でした。それに対して,デジタル電子回路を使うのがステッピング・モータです。Surveyor 計画では,地球から月面に永久磁石を持ち込むことは厳禁でしたから,variable reluctance(可変磁束)型と呼ばれるステッピング・モータの設計でした。1966年に最初のSurveyorが打ち上げられ無人着陸し,月面から映像が送られてきました。このときの宇宙船にも,太陽系での自機の位置と姿勢の計算のために自立型慣性航法が使われたと思うのですが,Harrierに搭載されたものとは異なる原理でしたかもしれません。
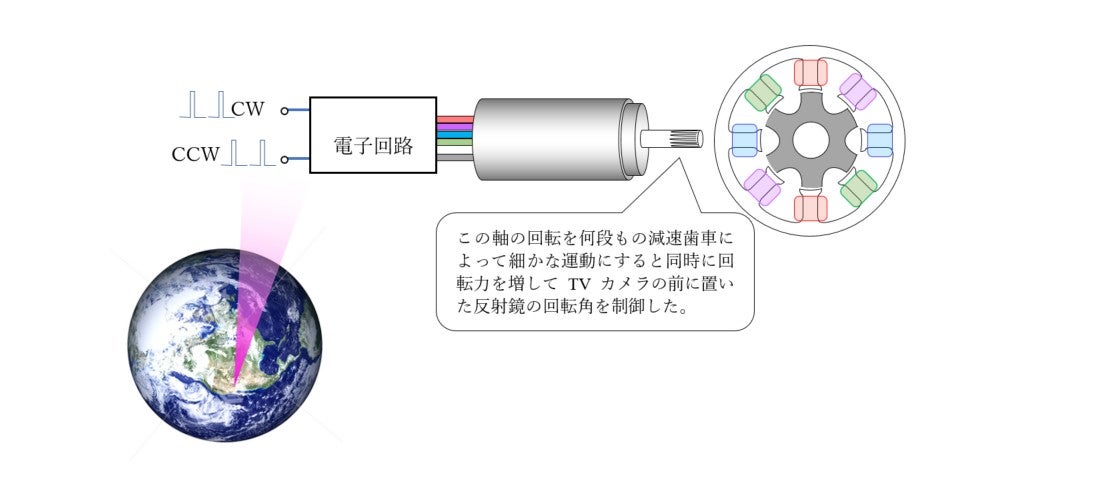
図19-5 に描いたように,ミラーを回転させるステッピング・モータは地球からの電波で操作されました。デジタルのパルス信号でなくてはなりません。江川さんは,航空機用の2相サーボモータを改造してVR型ステッピング・モータを造りだしたのです。固定子と回転子の断面を見ましょう。今,赤の巻線に電流が流れていてステータ鉄心とロータ鉄心の歯が整列しています。電流を緑の巻線にスイッチすると時計方向に15°ステップします。紫の巻線にスイッチすると反時計方向に15°ステップします。
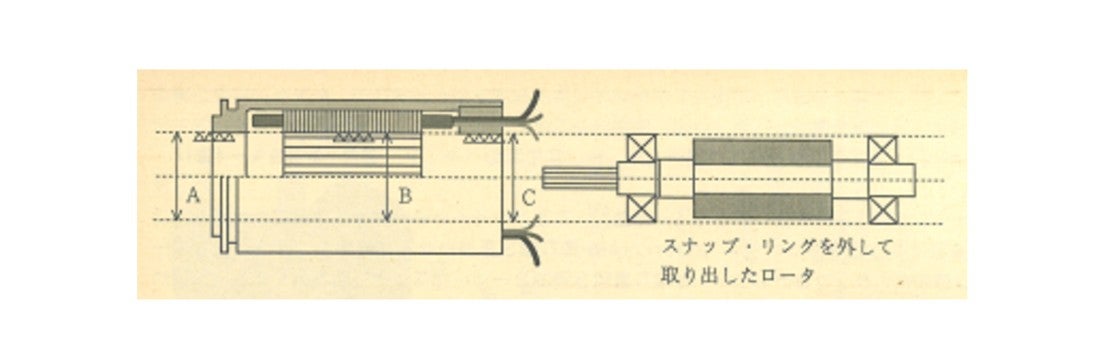
宇宙機器の信頼性の要件は少ない部品点数と簡単な構造です。( 図19⁻6 参照)アナログ制御モータからデジタル制御モータへの転換のときに,江川さんはthrough-boarと呼ばれる工法で空隙(ステータとロータの間の空間距離)を精密に確保したのです。永久磁石を使わないステッピング・モータの生命はここにありまりました。
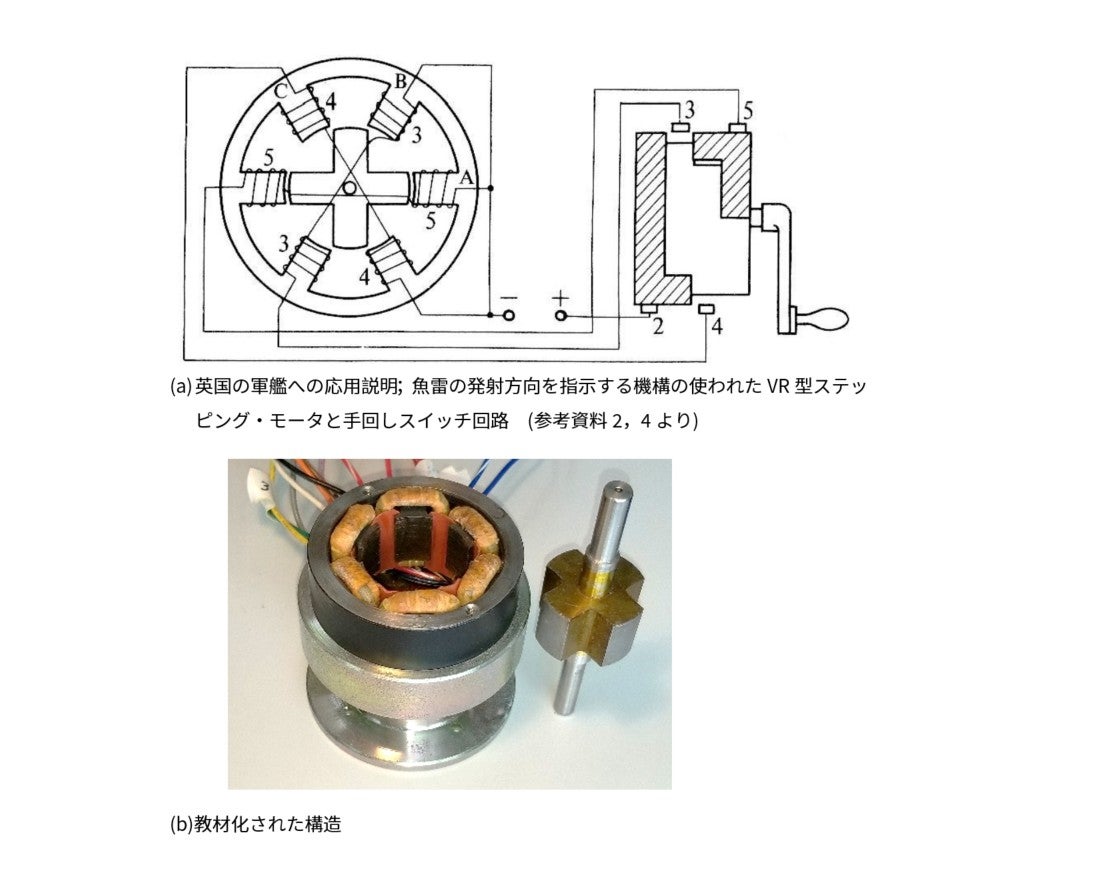
図7(a) は英国の軍艦に搭載されたステッピングのモータの原理です。 (b) は1970年代にこれを基に筆者が教材用として設計し,大田区にあった大東製作所に製作していただいたものです。江川さんはこれを見て,戦後の秋葉原のジャンクによく似たものがあったとのことでした。英国から帝国海軍にこの技術が導入されていたのかもしれません。
江川さんの開発物語の詳細は拙書ブルーバックス『モータを創る』 [3] に記しました。資料 [4] にはVoyager programでは永久磁石式を使った場合について付言しています。
References
- [1] 岡田 實・小田達太郎:航空機の自立航法装置,コロナ社,1972
- [2] 見城・佐渡友:小型モータのすべて,技術評論社,2001
- [3] 見城・加藤:モータを創る,第2章,講談社ブルーバックスB909 2
- [4] T.Kenjo and A.Sugawara: Stepping motors and their microprocessor controls, 2nd edition, Chapter 8, Oxford University Press,
慣性航法装置
飛行機や潜水艦などが自機の位置と姿勢を,3次元空間の3軸方向の加速度計測と計算アルゴリズムによって正確に算出する装置であり,2種類それぞれ3個のモータが使われる。一つは独楽の原理で基準軸を保持するモータであり,3個(軸)のサーボモータによってplatformを保持する。慣性航法制御の起源は第2次大戦末期のドイツ軍のV2ロケットにあった。ドイツの降伏のとき連合軍がいち早くこの技術拠点を押さえた。その後,米国ではMITが研究拠点の一つとなり,アポロ計画の準備として大きな進展があった。
図19-3(a) はジャイロ(Gyroscope)と呼ばれる機構で,ロータは一定の回転速度で回る独楽と思ってよい。慣性モーメントと速度の積が大きいと一定の姿勢を保持しようとする作用が大きい。地面やテーブル上で独楽を回すとわかるのだが,最初は垂直に回っている独楽でも速度が落ちると傾いて歳差運動をする。その原因は地球の重力にある。逆転の発想で,独楽の微細な動きから重力が計算できる。アインシュタインが一般相対性理論を構築したときに,重力と加速度の等価性を見抜いたことを知る読者は多いだろう。この装置を飛行機に搭載すると,次のことがわかる:
独楽のモータとして適正なのが高速回転する小型のヒステリシスモータだが,このモータについては第15回に詳しく記した。ジャイロが検出する回転はAngular rate (角速度) は宇宙空間(慣性空間 inertial space)での回転を意味する。ジャイロはinertial sensorと呼ばれる。
参考資料[1]
江川さんが後の1971年にミネベアの役員として米国の航空機器関連モータの技術動向を調べる渡米したときにダラスの空港で見たのがボーイング747ジャンボジェットのtouch and goであった [2] 。防衛宇宙機器として発達した慣性航法装置を民間航空機に取り込んだのも747であった。一方で電気機械的(electromechanical)なセンサ表示が操縦室から無くなり始めためたのも747からだったかもしれない。