モータの不思議と更なる可能性の探究
最終(第二十回) 空飛ぶクルマに向けて Toward eVTOL
前回,avionics(航空電子工学)という専門用語を前回導入し,この分野のモータ設計と制御について少し触れました。その一つがVTOL Harrierの慣性航法装置でした。この分野の元年は1960年でしたから,今年で65年になります。今回は2005~10年のavionic motorの進化の場面をふ りかえりながら,現代の最先端の一つであるeVTOLに言及します。
キーウの空に舞ったNidec motor
語らずにおけないのが2008年のキーウ(Kiew)でのavionics競技です。それはラジコン飛行機のオリンピックと知られるF5B世界選手権です。平年の初秋のウクライナの天候は穏やかなのですが,2008年9月半ばのキーウの空は天候異変に見舞われました。郊外の平原では13ケ国から集った33人のF5B選手がドローンを飛び交わしていました。気温7℃の霧のなか,ロシア人選手の眼鏡には水が溜まり,プロポを操る日本人選手の手はかじかんでいました。しかし,日本製モータを搭載したドローンは,地上から150mの高さにわずか2秒(時速270km)で達し,ドイツ製モータを使う欧州機を圧倒していました。
ウクライナのチームの参加はなかったのですが,F5B機体の製造はウクライナでもされていたようです。プロペラ駆動からグライダー飛行へ旋回するときの遠心力に耐えるために日本チームの機体は桜庭強志様(後の図20-2写真左)の手によってカーボンファイバーを使いました。では日本製モータとは,どのメーカのものだったのか? Nidecである。とは言っても,工場や事業所は数多いです。日本電産モ―タ基礎研究所(Nidec Motor Engineering Research Laboratory,NMERL)の手作り品で,直径39mm,重量385gの体格でした。これは当時のF1のエンジンの7kW/kgを超えていました。この世界戦の直前まで私どもは,日本の夏の熱い環境で飛行テストをしていました。モータにとってはキーウの想定外の寒い初秋は好都合な環境だったと言いたいのですが,通常なら4日間8ラウンドで行われる競技は天候異変によってたびたび中断して,3ラウンドで打ち切りとなりました。
VTOL Harrierの姿勢制御用のサーボモータと私どものavionic motorは無縁でありませんでした。1976年のことですが,スコットランドの古都エディンバラのFerranti社で,このモータを見たときに,値段は同じ重量の銀よりは当然高いでしょうね?と私が問うと,McDermottさんは “Not silver but gold.” と返されました。高価な素材の精密加工と技能訓練された器用な女性の手指による巻き線作業によって作られるモータとはいえ,それほどまでコストがかかったのだろうか,或いは彼の自己評価だったろうか? そのときに頭をよぎったのが,小型モータを研究テーマとするからには,航空宇宙機器を知らずして専門家たりえないことを知った悔しさでした。
この悔しさを解消したい長年の願いがあって,2005年にNMERL が開設されたとき,所長として私は京都本社の講堂で「世界No.1の小型高出力モータの創出」を宣言しました。早道はその世界のオリンピックとして知られる電動飛行機の競技で優勝できるモータの開発であり,略10人のスタッフで達成したのが2010年8月でした。
この企画で実質的なリーダを努めた佐渡友 茂さんはISO国際審査員の仕事を3年あまり中断してこのavionic motor設計の企画に専念されました。このようなモータで世界の壁を超えるチームワークというものがどのようなものか,私たちは学びました。部材・部品の調達,モータの設計,永久磁石の扱い,計測機器の組み立て,風洞設計と製作,バッテリー,フライトレコーダ,駆動回路,グライダーの操縦,組みつけ,協力くださるパイロットの方々との折衝・連絡,大会での後方支援,社外の協力者の育成など多岐にわたりました。
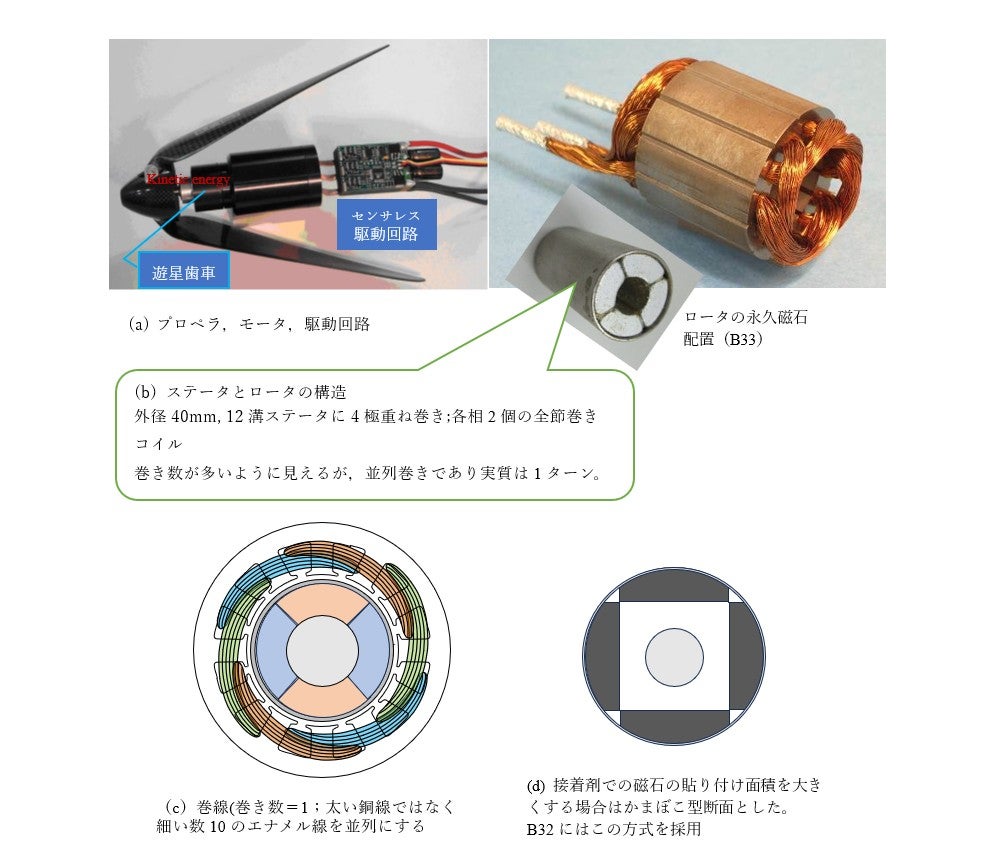
すると,これらの各方面で私どもを補佐する適任者が現れました。スタッフが充実し,アメリカと欧州でのモータの性能が急速に向上していたとき,それを追い越そうという密かな情熱が充実し始め,スタッフはこれを共有していました。図20-1は2008年ごろのモータの写真と断面構造です。試運転での機械的振動によるロータの破損や,熱と電機子反作用による減磁などの失敗もありました。駆動回路も容易ではありませんでした。しかし,最初の3年間には国内のF5Bパイロットの協力を得て成果が出ました。図20-2は2007年の国内戦で私どものモータを使った3人のパイロットが1~3位を独占したときの記念写真です。

2008年ウクライナの世界選手権では,
桜庭様:メカニック (機体の製造を含む)
上山様:プレーヤの一人
大畑様:チームマネジャー
として参画
優勝者の上山憲一氏は,関東地区の象徴的な存在であり,グローバルな人脈の持ち主です。そして翌年のウクライナでの世界チャンピオンへのステップが私どもの挑戦となりました。先述のように2008年のウクライナでの世界大会では天候を含め,さまざまの不測の事態に遭遇して成績は不本意な団体第4位でした。日本チームの実績としては過去最高位でしたが,この惨敗の経験は2年後の米国インディアナ州マンシーの大会で活かされます。スタッフの中に磁界解析ソフトウェアを使う者がいて,彼はモータ設計の極意を汲みとったと思えます。後述のように駆動回路の専門家も出現しました。「失敗は成功のもと」といわれるように,トップになろうとするなら,失敗が必要です。失敗したときにはそれは成功への道程であると理解し分析する過程で人財が育ちます。
卓越するドイツ語圏の技能
少し脇道にそれます。成瀬政男教授の信条に由来するNIDECの標語に「科学・技術・技能の一体化」があります。成瀬は東北帝国大学の気鋭として1930年代のスイスとドイツで「ものづくり」の哲学を修め,後年その実践を職業訓練大学校(現在名:職業能力開発総合大学校,英文名:the Polytechnic University of Japan)の初代校長として,日本に植えつけました。筆者はこの大学のfacultyの一員であり,後に日本電産を創立する運命を携えた永守重信青年は学生であり,副社長になる小部博志君は彼の4年後輩でした。科学・技術・技能の三位一体の意義が如実に表れたのがavionic motorへの取り組みでした。F5Bには団体戦と個人戦があって,隔年に催された世界大会の経緯を調べると,団体戦で優勝していたのはドイツとオーストリアのチームです。つまりドイツ語圏のパイロットの強さが明瞭でした。
第二次大戦終結後,ドイツとオーストリアでは本物の航空機の設計製造ができなくなり,彼らの情熱は模型飛行機に向けられたと言われます。(因みに日本でも,成瀬が帰国した東北大学の航空工学科でも連合軍によって飛行機関連の研究が禁止され,精密工学科に改組された。)ドイツのパイロットの強さの背景には豊かな練習量があります。彼らは仕事を早朝から始めて午後3時に終了帰宅して, 夏の長い昼間を存分に使って操縦訓練するのです。趣味ではなく人生をかけた事業です。
Nidec motorで世界チャンピオン
2006年,機械工学と熱力学の専門家である梶信藤教授が職業能力開発総合大学校からNMERLに来られました。筆者は名誉所長に退き彼がNMERL所長となり,この他の企画の補佐的な仕事を遂行しました。F5Bの企画では,私どもが優れたモータを創ってそれを世界に向けて明示するためには,団体戦ではなく個人戦でなくてはいけません。そのためにはドイツとオーストリア以外の欧州チームの有望なプレーヤにNidec モータを提供して,操縦技能を磨いてもらう必要が明らかになりました。このような状況でのキーウ大会での収穫のひとつはスイス生まれでイタリア在住の新人Remo Frattiniと私どものスタッフとの出会いでした。彼がチャンピオンになるまでの物語が長文のletterとして保存されていました。Nidec motorsを使う決心をしたときの彼の心境をここに記します。
So I just needed a good motor, controller and propeller combination. With all this, my chances would be real. So I decided to use the NIDEC B32 motor a Nidec engineer has kindly given me. I knew from earlier tests that this is an extremely good motor. With the very strong Markus MX300 controller and an Avionik propeller I would have a very performing setup, I hoped. Flight tests then confirmed my assumption. My friend Ken Ueyama then helped me even more by lending me one of his B33 motors. Now I knew, I would have two very good setups with a small difference in runtime.
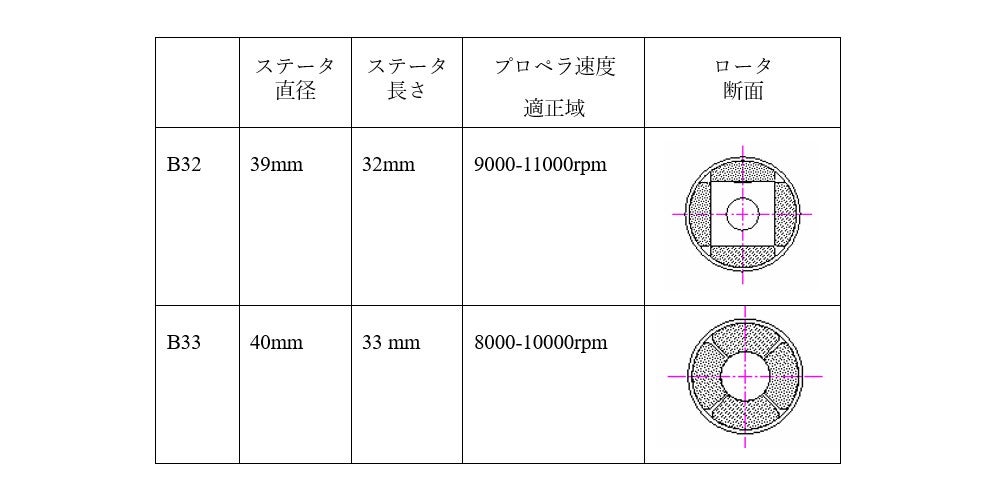
このように彼は研究員のメンバーが制作した2機種を使い分けられるようになったのですが,スリルに富んでいました。
Although I preferred the B32 motor, I later decided to use the B33 motor for the first flight of the. world championship, because total motor runtime was on the safer side. Although I didn't have a lot of time to practice before the championship, I was very confident and positive in attitude, because I knew that I probably had the best material.
Ken Ueyama helped me once more on the last day by giving me his propeller because he knew I .preferred the B32 motor. He also believed that the B32 was better in these circumstances. With his propeller I would have the right amount of runtime with the B32. And it all worked out! I did win the last two rounds. The motors performed perfectly. The last round was the deciding one. I knew I had to fly well if I wanted to win. I was nervous but I believed I could do it. I managed to fly smooth and well in the distance task. Only 10 more minutes for the duration task and the landing. These were probably the longest 10 minutes I ever experienced. Almost 10 minutes over, when entering for the landing, I knew no mistakes were allowed. I had to make a perfect landing. I was nervous. But everything worked out perfectly. The landing was on the spot. I was incredibly happy - I had won the world championship title!! 着陸は完璧でした。僕は信じられないほど幸福でした。世界チャンピオン・タイトルを勝ちとったのです!!
このようにしてRemoは気にいったB32モータを使って夢を実現しました。それを報じたWebニュースをここに若干の編集を加えて紹介しましょう:
The F5B World Championship is held biennially and competed for between the world’s best pilots and teams. The 2010 contest-winning glider was flown by an Italian team pilot Remo Frattini, who ranked first among 37 contenders, and became the first BLDCM-equipped model glider to win the world title in the F5B class. In the 2010 contest, Frattini and three Japanese contestants used Nidec’s high-performance BLDCMs designed by Nidec Motor Engineering Research Laboratory. Nidec started providing Frattini with its BLDCMs two years ago in response to his personal request. Since then, Nidec has strived to enhance their BLDCMs for model aircrafts through stringent performance tests and countless joint trial flights with many world-class players. The 2010 World Championship title came as the result of a superb combination of Frattini’s extraordinary flying techniques and Nidec’s evolving BLDCM technology.
BLDCM stands for brushless DC motor

小型・高出力のモータと駆動回路の設計
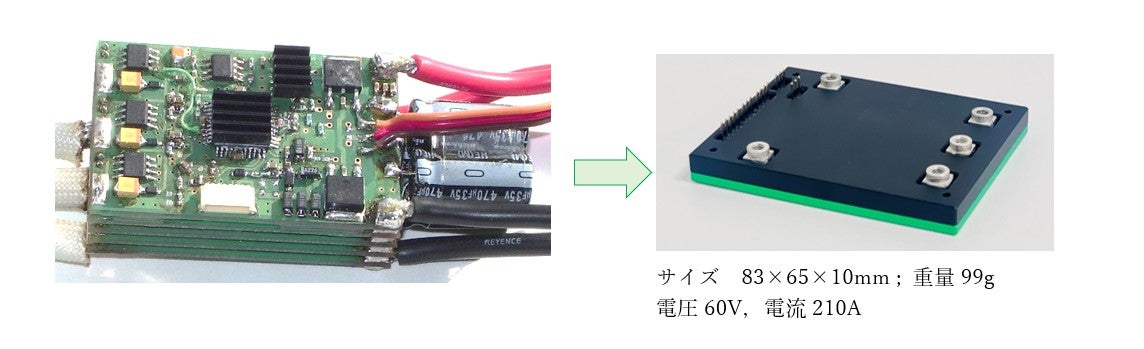
このような小型で強力なモータを製作するには理論計算と工作技術が必要です。ただし,数個のモータや駆動回路の場合には手細工作業の技能も重要でした。狭い空間に構成された駆動回路には300Aもの電流がON/OFF制御されるばかりか,センサレスのための論理信号が行き交うことを知りぬいて,100個に近いMOSFETを配置しハンダ付け作業をして回路制作できる専門家が育成されました。これは電子現象を知り抜いた技術者の知恵の技です。 (MOSFET = Metal-Oxide-Semiconductor Field-Effect Transistor)
筆者のように数式の操作によってモータの性質を捉えようとするのも一つのやり方ですが,飛行機のプロペラを無線装置で指の操作で捉えるという技は驚きです。
私どもNidecとして,競技用小型ドローン・モータ自体の改良から得た知見はヘリコプター型ドローンやロボット等の各種機器むけモータの設計と制御に向けられました。今日ドローンと呼ばれるヘリコプター型の電動飛行機がにわかに現れたのがその頃です。
安全性:科学技術の重要性
Avionic motorの現代の話題は2025年の大阪万博で出展されたような大型ドローン-eVTOL(電動機によって垂直離陸着陸する航空機,図20-4)-です。筆者らの小型機での世界チャンピオン輩出の体験が人を運ぶ電動飛行機の分野に入る道案内になるかもしれません。世界No.1のレース用のドローンのモータの実現のためにさえ10人のスタッフを必要したので,人を乗せるeVTOLのための技術要素はかなりの大規模です。ここでは,モータ自体のサイエンスに焦点を当てます。図20-1のグライダー用モータと大型ドローン・モータを比較することによって,永久磁石を使うモータ設計の奥技を語ることになります。一つの結論として,eVTOLでは極数の多いモータを目指します。VTOL Harrierの慣性航法装置のサーボモータは永久磁石を使わない多極設計の極意でした。筆者にはこの共通点にも不思議を感じます。

モータに要求される性能の一つは瞬発力です。電源電圧の制限が25Vですが300Aもの電流を引き出すと内部抵抗による電圧降下で20Vを切ることもあります。この低圧では巻き数が最小の1であり,Y結線が可能か?あるいはΔ結線にすべきか?など,限界への挑戦課題がさまざまありました。その当時の数年間に,情熱あふれるモータ設計者とパイロットの連携によって出力が10倍近く上がっていたようです。25Vの制限がなければ,性能はさらに向上したことは確かです。
モータの構造はできるだけ簡単なことが望ましく,12スロット4極で重ね巻き(lap-winding)が標準でした。小型高出力の設計要件は,高速回転と減速歯車の組み合わせです。遊星歯車の利用はその意味で妥当でした。モータの外径が40mmぐらいでは,4極がステータ巻線にもロータの磁石配列にとっても適切というか標準的です。(注意:巻線の極数とロータの極数が同じなことを暗示している。)しかし,空飛ぶクルマの場合には,安全のために機械式歯車を使わない直結駆動によってプロペラを回します。回転速度は比較的低く,速度領域は広くはありません。
電機子反作用への配慮
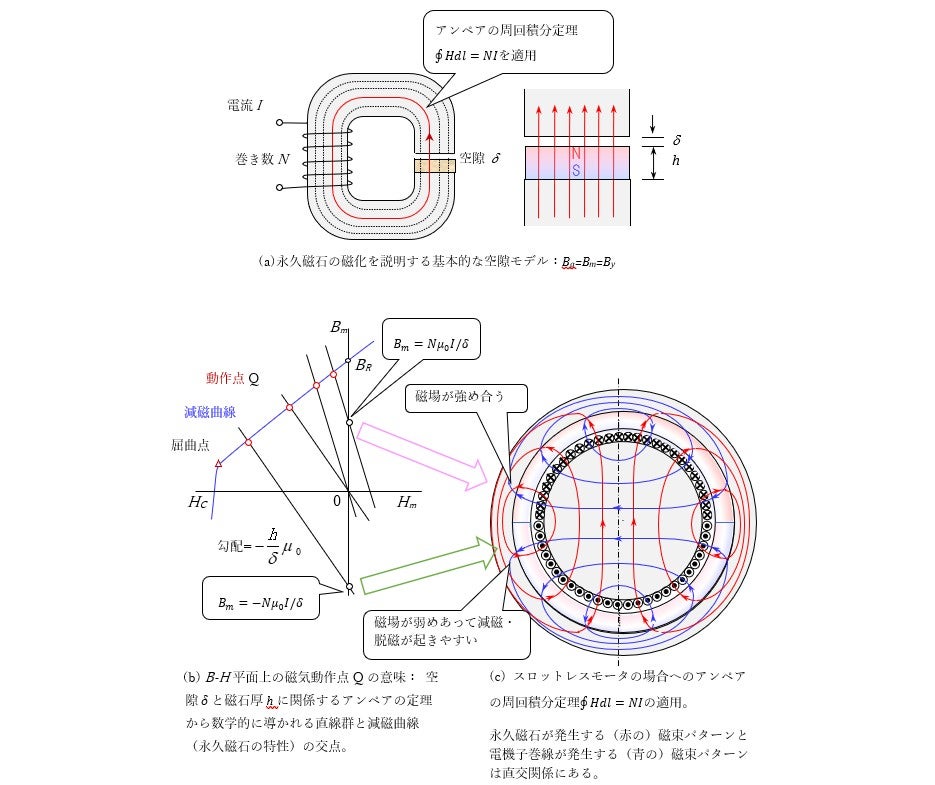
第15回の誘導モータや第19回のVR型ステッピング・モータには, 電機子反作用による脱磁(減磁)という問題事項はありませんでした。永久磁石を使うモータの場合にはこれが重要問題であり,如実にこれを知ったのがF5B用モータの開発の初期段階でした。それを少し説明しましょう。永久磁石モータでは,基本則としてトルクTと電流Iの関係式としてT = KEIがあります。プロペラを回すトルクTを高くするために電流Iを増やせば良さそうです。もちろん,その副作用として巻線での熱発があるのですが,より重要なのは巻線電流が発生する強い磁界が永久磁石にダメージを与える可能性です。その複雑なメカニズムの要点を説明するのが図20-5)です。(a)は基本になるアンペアの周回積分定理の最も単純な場合への適応モデルです。この基本則は1820年にコペンハーゲンでのエルステッドの有名な実験の7ケ月後にアンペアによってパリで提唱されました。ただし,永久磁石の脱磁という問題がこの法則によって論じられるようになったのはずっと後のことです。脱磁の問題がモータ設計者の間の日常の話題になったのはアルニコ磁石を使ったDCモータの設計開発が各所でなされた時でした。アルニコのBRは高いのですが,HCが低いために有効な(BH)MAXが小さくなります。残留磁気が低い代わりに保磁力が高いフェライト磁石では減磁が起きにくいです。アルニコは残留磁気が大きいにも拘わらず,減磁しやすいことの説明には同図(b)(c))が必要です。動作点(G)が屈曲点(英knee<ニー>, 独Knick<クニック>)の左に入ると永久磁石の磁化の状態が回復できません。結果としてKEが低下します。磁石が過熱されると屈曲点が右に移動して減磁しやすくなるので電流制限しなくてはなりません。モータ構造では同図(c))からわかるように,この減磁が最初に起きるのは永久磁石の一方の端です。
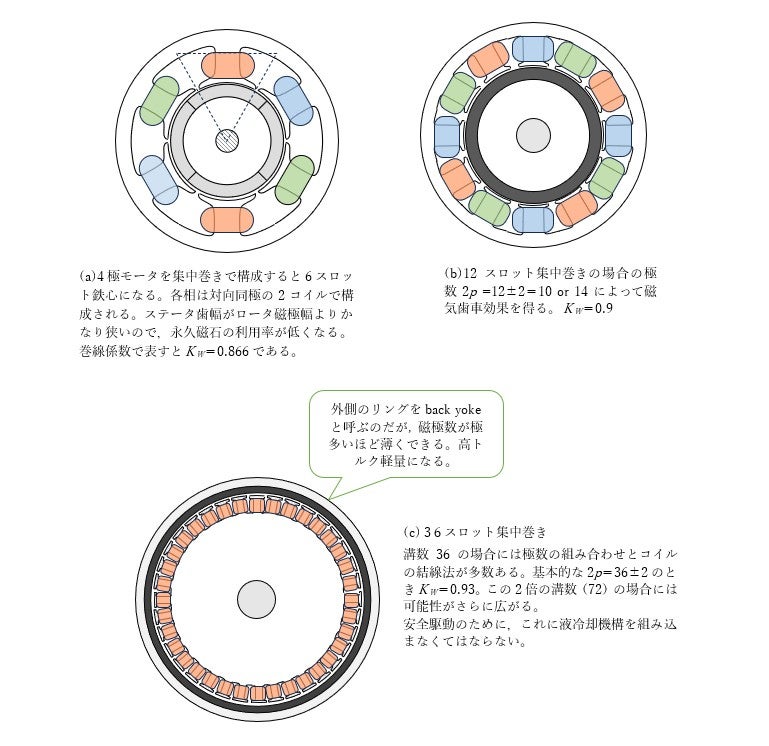
軽量で高トルクを欲しい状況ではトルク定数の低下が起きると不慮の事故を誘発するかもしれません。これを避けるための有効対策が永久磁石と巻線の極数をできるだけ多くすることです。たとえば,78極とか80極の設計がされます。80極のために図20-1の4極構造を20倍すると,巻線の溝数が12×20=240です。コイル数も240個で重ね巻きを手細工することになります。電圧は高くてよいので細い電線での手細工は可能です。これに代わる簡単な仕組みとして採用されるのが集中巻きです。溝数は80-2=78です。
ではF5Bモータになぜ集中巻を使わなかったのか?その場合には図20-6(a)のような6溝ステータになります。OA機器用にこの設計が多いのは,永久磁石の利用率が低くても必要なトルクには余裕があるためかもしれません。できるだけトルクを出すための目安の一つとして,永久磁石が発生する磁束の利用率を巻線係数KWで数値化します。
図20-1のモータ構造では巻線係数が最大値KW =1であるの対して,図20-1図20-6(a) の6溝(スロット)集中巻きではKW =0.866に低下します。
図20-5(a)は磁化された永久磁石の動作点と脱磁を論じるグラフです。ここではC型鉄心の溝に磁石片を置いて巻線の電流で磁化をする基本モデルです。図20-5(b)は12 溝ステータに集中巻きする場合であり,ロータ用永久磁石の極数は12±2=10極あるいは14極であって,いずれもKW ≒ 0.9です。図20-5(c)の36溝の場合にはKW =0.93です。溝数をさらに72とか78に増して80極にすると,KW はさらに1に近づきますが,多極化による負の効果にも用心します。例えば,駆動周波数の増加が鉄損の増加を招きます。
さらに,磁気構造として,インナロータ,アウタロータ,アキシャル・フラックス型,ダブルステータ型など多くの提案があります。しかし,航空機用として重要なのはできるだけ簡単な構造です。
トルク密度の概算
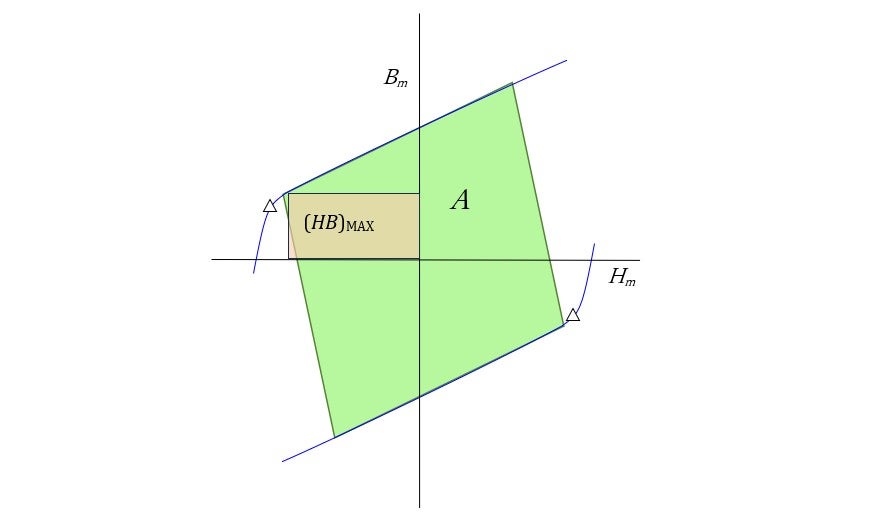
80極(p=40)モータの場合に絞って重量当たりのトルク概算の原理の一つを論じておきましょう。スロット数が多くて,溝開口がなく閉じている理想的な場合には,図20-7 の線図から限界トルクが算出されます。平行4辺形の面積をAとすると理論上の最大許容トルクは次式で決まります。

実際問題の概算としてAが最大エネルギー積 (BH) MAX の何倍までとれるかを検討してみましょう。久磁石利用率パラメータκを導入して,これを次式とします。

そして

として,磁石体積Vmを設定して限界トルク TMAXを算出してみます。
磁石の形状から体積Vmの概算:円筒形で φ400mm,厚み6mm,高さ50mmとすると

であり,すると限界トルクは:

磁石の比重を7.55とすると,全磁石の重量は略2.82kg です。冷却機構を含めたモータ全体の重量が磁石重量の何倍にできるか?これが実際問題です。この10倍とすると,現実的なトルク密度は

であり,インバータ等の駆動装置を含めて10倍ではなく20倍でも116 Nm/kgのトルク密度が見込めます。
eVTOLは8機のリフターで機体を垂直に持ち上げます。略130 rad/sのプロペラの回転速度で必要なトルクは1.8 kNmであり,出力では234 kWです。先の6.53 kNmは1.8 kNmの3.63倍であり余裕があます。しかし5~6 kNmで連続運転させては巻線の発熱が大きすぎていけません。ここには少なくても2つの事柄が潜んでいます。一つはフィンを使う空冷の効果は低いので,油冷になるのですが,その機構が複雑です。では,銅線に代わって超電導材料による巻線に期待できるでしょうか? これは科学技術の新たな挑戦課題の一つであり容易ではなさそうです。さらに言及すると,量子力学を含めて現代の先端物理学においても,超電導の原理説明が完成していないようです。
さらに重要な問題は,熱力学の第2法則とエントロピー増大問題です。これは大宇宙の問題であり,身近には私どもが直面している深刻な地球温暖化です。アインシュタインは,チューリッヒのPolytechnic在学中に熱力学の奥深さに気づいたと書き残しています。この物理を象徴するのがエントロピー増大に関する第2法則です。エントロピーSはエネルギーJを温度Qで除した物理量S=J/Qであり,無秩序さを表すとされます。あらゆる物理現象はSが大きくなるようにつまり無秩序に向かって作用するというのが第2法則です。(因みに,第1法則は熱エネルギー保存則です。)
老練な物理の教授の授業で,この法則は宇宙の終焉を示唆する大原則らしいことを知って筆者が憂鬱になったのは18歳のときでした。その翌年,専攻を電子工学に決めたときに新鮮さを覚えたのが新任の若い助教授による光電子仮説の説明でした。アインシュタインがボルツマンの統計力学によるエントロピーを論じて,その計算から光が粒子のような性質をもつことを導いたことに感銘したのです。それは彼がベルンの特許局時代の25歳,1905年3月にAnnalen der Physik(物理学年報)に寄稿した論文です。そして5月にブラウン運動の解明を論じたのです。この現象は長いあいだ原因が不明のままでしたが, 熱運動する媒質の分子の不規則な衝突によって引き起こされているという内容です。この論文は当時不確かだった原子および分子の存在を実験的に証明できる可能性を示したと言われます。
普通に手に入る書籍の相対性理論はエントロピーとか分子や原子の統計論には無縁の世界です。これを創出した青年アインシュタインの頭の中では関連していたと思います。今日特殊相対性理論として知られる論文を「運動物体の電気力学」と題して寄稿したのは1ケ月後の6月です。ここに不思議が潜んでいます。それについて第12回に詳しく論じたように,相対性理論の発想のきかっけは単極発電機(unipolar machine)でした。ですから,彼の頭には運動物体とは発電機やモータのロータだったと思われます。しかしこの論文を読み続けると,更に不思議なことに,彼は運動物体の対象を電子に転じて,その質量が速度と共に増大することを導きます。ローレンツ変換です。
そして決定的な不思議は9月の短編論文そのものです。ローレンツ変換の数学操作から質量とエネルギーの等価性が浮かびあがるのです。この論文は「世界一短い方程式 ![]() 」とも言われるのですが,アインシュタインは等号で結んだこれを記述していません。これ以前にケンブリッジのラーモア(Larmor)やウイーンのハーゼンウアル(Hasenöhrl)がそれぞれ異なる状況で
」とも言われるのですが,アインシュタインは等号で結んだこれを記述していません。これ以前にケンブリッジのラーモア(Larmor)やウイーンのハーゼンウアル(Hasenöhrl)がそれぞれ異なる状況で ![]() を呈示していたのですが,アインシュタインは知らなかったようです。 相対論によって4/3が落ちて,
を呈示していたのですが,アインシュタインは知らなかったようです。 相対論によって4/3が落ちて, ![]() の物理的意味が決定的に変貌しました。以上のことを短く図表にしたものが表20-2と図20-9です。このように, 4論文は三角錐で象徴的に描かれる1個の事柄の4面であると言えそうです。筆者には特殊相対性理論はさまざまなモータの花園のように思えます。
の物理的意味が決定的に変貌しました。以上のことを短く図表にしたものが表20-2と図20-9です。このように, 4論文は三角錐で象徴的に描かれる1個の事柄の4面であると言えそうです。筆者には特殊相対性理論はさまざまなモータの花園のように思えます。
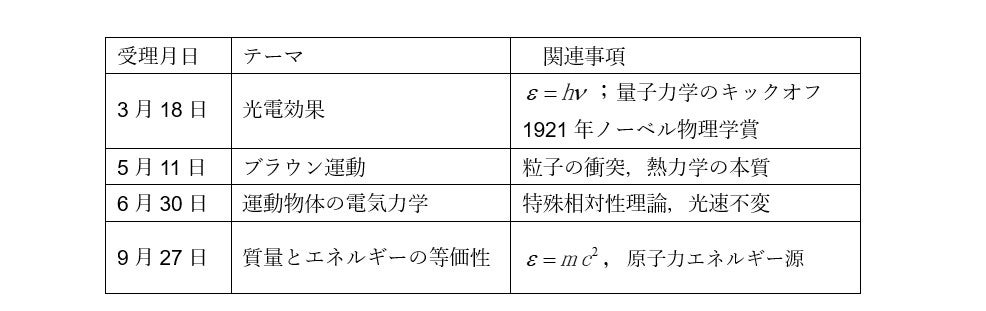
光電効果,ブラウン運動,特殊相対性理論,質量・エネルギーの等価性は三角錐 4面。相対性理論はモータの秘密の花園
1915年暮れにアインシュタインは一般相対性理論を提言しました。そこではエントロピー増大はどのように捉えられるのでしょうか? アインシュタインの後継者を自負するSir Roger Penroseが1965年にPhysical Review誌へletterとして寄稿した論文を種子として構築した壮大な輪廻論がConformal Cyclic Cosmologyであり,エントロピー増大を帳消しにするメカニズムであり,彼は2020年のノーベル賞講演でこれを語りました。参考資料[2]にはモータと特殊相対性理論の関係からPenroseのCCCまで詳しく書いてみました。
図20-8の写真はeVTOL用に開発中のモータであり,2025年7月のTechno-Frontier 展示会に出展示されたものです。

参考資料
- 1.見城・佐渡友: メカトロニクスのモータ技術,第3章, 技術評論社, 2020
- 2.見城・佐野:幾何で見える必ずわかる一般相対性理論