モータの不思議と更なる可能性の探究
第十六回 同期モータの構造と種類
第11回の冒頭に綴ったように,モータには豊富な種類があるのが不思議です。 電源で大別してDC(直流)モータとAC(交流)モータの分類で十分だった時代があります。交流モータには整流子型と回転磁界型があって,さらに回転磁界型には
◆誘導モータ(英 Induction motor,独Asynchronmotor)と
◆同期モータ(英 Synchronous motor,独Synchronmotor)
に分けられるとする考えがあります。前回は誘導モータでしたので,今回は同期モータの出番です。ちなみに,ドイツ語の記事や論文をみていると誘導モータはAsynchronmotor(非同期モータ)と記されています。(英⁻独)辞書にはこの語のほかにInduktionsmotorやInduktionsmaschineもあります。英語でのasynchronous motorには若干の違和感を覚えます。日本語を使う専門家の間では「誘導機」と「同期機」に分類します。
駆動法からの大きな分類として同期モータには
◆自起動型:50/60Hzの商用電源に接続すると起動して同期速度に達するように設計されたモータと,
◆電子回路利用型:ロータの回転角情報を取り込んで,電子回路によって起動・加速して速度が定まる方式
があります。
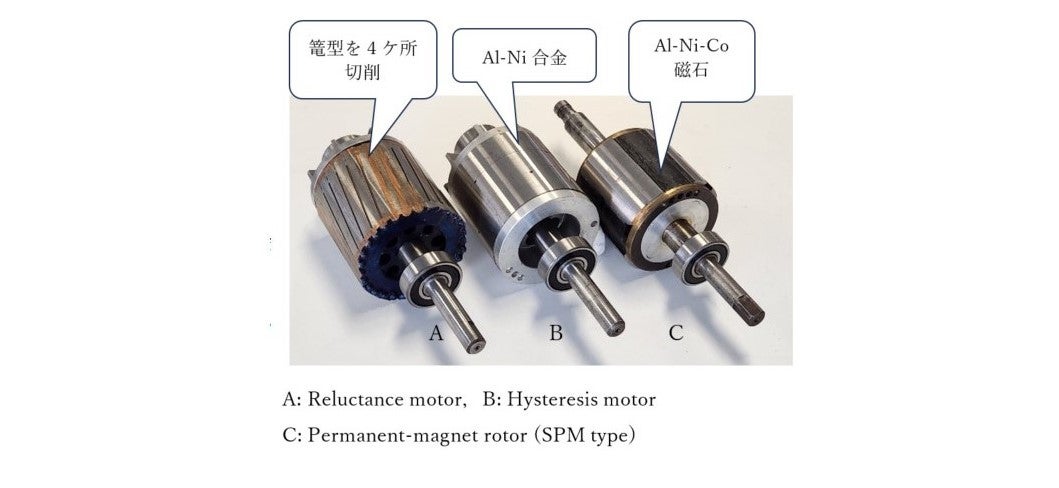
誘導機との類似性があるのが自起動型です。それをまず見ましょう。自起動型にはまた2種類あります。これらの事柄はロータの構造とそこに使う材料の性質に関係します。それを 図16-1 の写真で見ます。
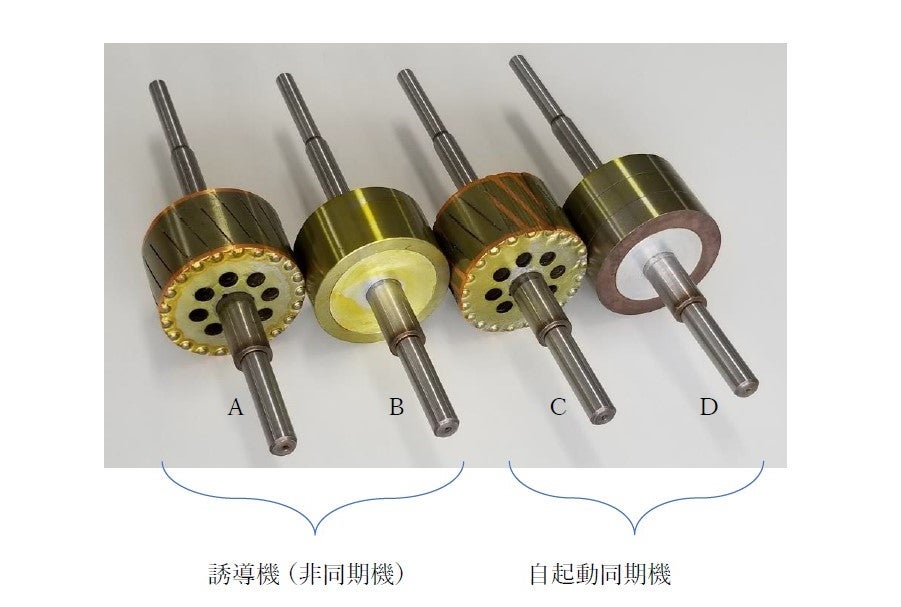
構造と材料の説明
A: 籠型ロータ
B: 塊状鉄心ロータ
C: 凸極籠型;リラクタンスモータ
D: ヒステリシスモータ用
リラクタンスモータ
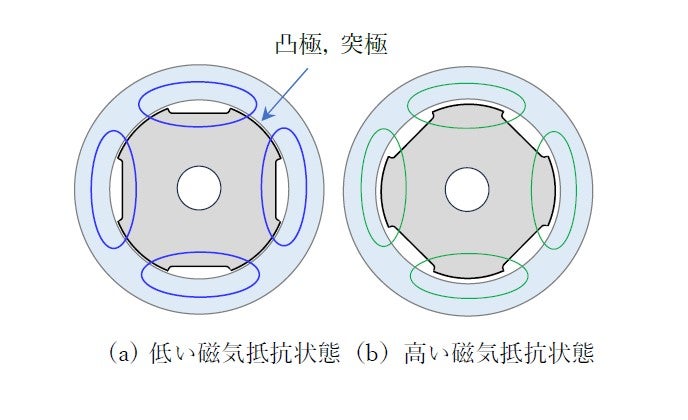
図16-2 は円筒形のロータの4か所に凹型を刻んで凸極型にしたものです。4極の磁界が通り易いのは(a)の青の場合であり,通り難いのが(b)の緑の場合です。磁界の通り難さをreluctance(リラクタンス)と呼ぶのですが日本語では磁気抵抗です。電気抵抗はresistanceです。
巻線の電流によって磁界を作ろうとする作用(起磁力)が発生したときに,自然は(a)と(b)のどちらを選択するでしょうか?それは磁束が流れやすい(a)です。磁界が回転するとき,この好ましい状態を維持できれば同期モータになります。そこで,このような凸極構造と籠型導体構造を組み合わせれば,起動・加速して同期運転に入ります。ただし,負荷が大きすぎてはいけません。それが図16-1のCであり,これをリラクタンスモータと呼びます。これは出来あがった籠型ロータ(A)に浅い凹溝を削りこんだものです。
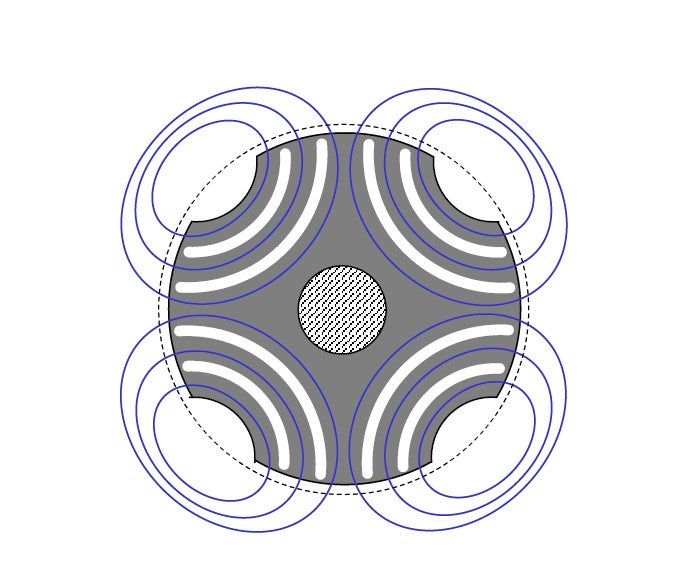
図16-3 には,磁束の通りやすい配置をしっかりと作り出すためにflux barrier孔を彫り込んだ断面を示しています。
実際問題として重要なのは,具体的な用途で確実に起動して,高い効率で運転できるかどうかです。そのためにflux barrierの形状に工夫がされます。
巻線に流れる電流による磁束がとおりやすい(a)の状態が自然
渦電流モータからヒステリシスモータへ
図16-1
のAとCのロータは断面構造の違いによる非同期モータと同期モータでした。次の課題は
図16-1
のロータBとDの類似性と相違です。Bは普通の鉄(機械構造用鋼)を使っているので,構造としてはいちばん簡単なロータです。Aの籠型では磁束の通路と電流路は分かれていましたが,Bの鉄には磁束も電流も流れます。このロータはsolid-steel
rotor(塊状鉄心型)あるいはeddy-current type (渦電流型)と呼ばれます。その
![]() 特性は籠型に対応させると前回の
図14-7
の大きな
特性は籠型に対応させると前回の
図14-7
の大きな
![]() の場合に似ています。つまり起動トルクが高く,速度とともにトルクは低下します。普通の鉄では,
の場合に似ています。つまり起動トルクが高く,速度とともにトルクは低下します。普通の鉄では,
![]() 特性の保磁力
特性の保磁力
![]() が極めて低いです。この材料に代わって,ほどほどの
が極めて低いです。この材料に代わって,ほどほどの
![]() になる合金でロータを構成したのがDです。“ほどほどの
になる合金でロータを構成したのがDです。“ほどほどの
![]() ”とは永久磁石にはなりにくいというふうな意味で,このような材料を半硬磁鋼と呼ぶことがあります。磁鋼を大胆に3分類すると:
”とは永久磁石にはなりにくいというふうな意味で,このような材料を半硬磁鋼と呼ぶことがあります。磁鋼を大胆に3分類すると:
◆軟磁鋼 (magnetically mild steel):低い保磁力の軟鉄
◆硬磁鋼 (magnetically hard steel)永久磁石用の高い保磁力の磁鋼
◆半硬磁鋼 (semihard steel):ほどほどの保磁力の磁鋼
であり,ロータとして奇妙な性質を現すのが半硬磁鋼であり,これを使うのがヒステリシスモータです。
ヒステリシスの意味
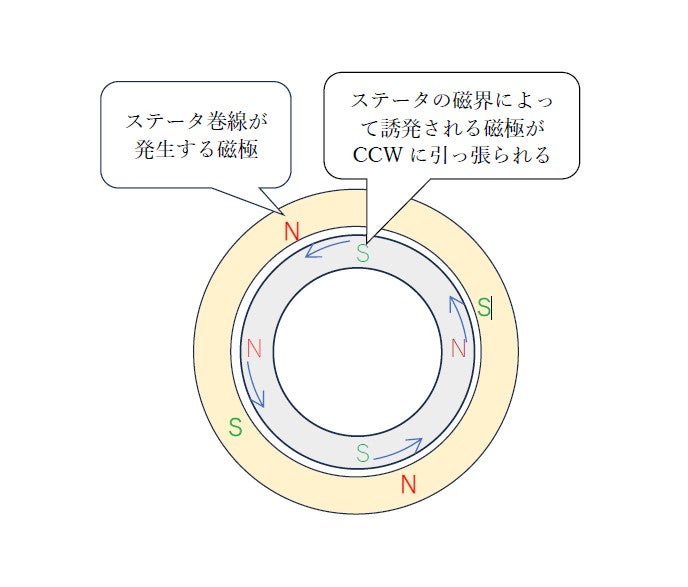
半硬磁鋼を使うヒステリシスモータでは,ステータ巻線が発生する磁極(Nとする)が円筒型ロータの磁鋼に逆極の磁化(S極)を誘発します。ここで重要なのがステータ磁界は回転していることです。反時計回りとします。すると
図16-4
に示すようにロータ磁鋼の表面の磁化がステータの回転磁界に少しの距離を保ちながら反時計方向に引きずられて表面を滑っているような現象が現れます。この現象をリング形状の磁鋼内のある1点で
![]() 関係として見るのが
図16-5
です。横軸を磁界強度
関係として見るのが
図16-5
です。横軸を磁界強度
![]() ,縦軸を磁束密度
,縦軸を磁束密度
![]() で表します。
で表します。
![]() は巻線と電流に起因する理論上の物理量であり,これを原因として観測可能な磁束
は巻線と電流に起因する理論上の物理量であり,これを原因として観測可能な磁束
![]() が作られるものと考えます。磁束の密度が
が作られるものと考えます。磁束の密度が
![]() です。
です。
(第11回に時空関係など詳しく解説)
複雑な磁気非線形を簡単な等価回路解析
![]() と
と
![]() の関係は
の関係は
![]() のような線形ではなく,時間
のような線形ではなく,時間
![]() に関係して
図16-5
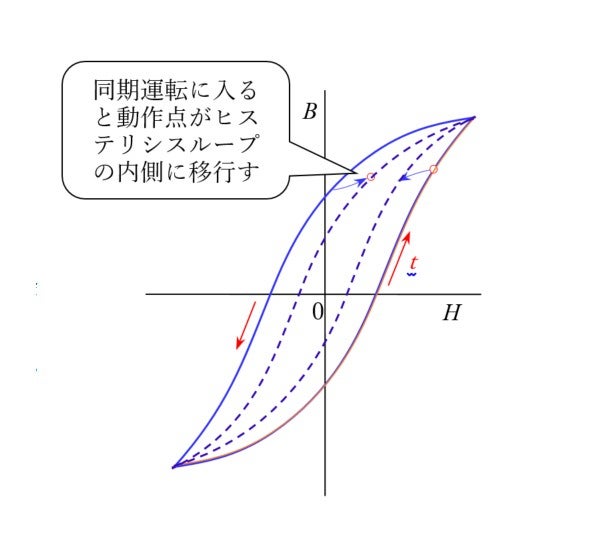
のような形を呈するのがヒステリシス(磁歴)です。磁界の動作点の変化が1サイクルしたときに図形は一巡してその曲線が囲む面積が単位体積当たりに消耗されて熱になると多くの本には記されています。この記述を鵜呑みにしてはいけません。そうかな?という疑問からこのモータの不思議の謎が解かれるのです。
に関係して
図16-5
のような形を呈するのがヒステリシス(磁歴)です。磁界の動作点の変化が1サイクルしたときに図形は一巡してその曲線が囲む面積が単位体積当たりに消耗されて熱になると多くの本には記されています。この記述を鵜呑みにしてはいけません。そうかな?という疑問からこのモータの不思議の謎が解かれるのです。
◆ ロータが止まっているのであればそうかもしれないが,
◆ 回っているのであれば
ロータと共に回転する座標系での
![]() と
と
![]() の時間的な変化を計算して,熱損失
の時間的な変化を計算して,熱損失
![]() の計算式を出せば良さそうです。たとえば京都の同期速度60Hzで考えます。止まっているとすれば毎秒60サイクルですからこの面積の60倍が熱になってしまうでしょう。それが60Wだと想定します。けれども加速して毎秒20回でまわっているときには,ロータ上では60-20=40サイクルの変化であるから,熱になるのは先の計算の2/3です。
の計算式を出せば良さそうです。たとえば京都の同期速度60Hzで考えます。止まっているとすれば毎秒60サイクルですからこの面積の60倍が熱になってしまうでしょう。それが60Wだと想定します。けれども加速して毎秒20回でまわっているときには,ロータ上では60-20=40サイクルの変化であるから,熱になるのは先の計算の2/3です。
◆このとき,綺麗に作られた円筒形のロータが回っているのかどうか目視では判断できないと想定します。しかし,
![]() の変化は静止しているステータの電流に依存するので,静止座標系のロータでも依然として毎秒60回の
の変化は静止しているステータの電流に依存するので,静止座標系のロータでも依然として毎秒60回の
![]() -
-
![]() 変化に見えます。具体的に毎秒60Wのエネルギーが巻線から空隙を介してロータに(消費されているのではなく)注入されていると考えます。発想の切り替えです。注入される電力
変化に見えます。具体的に毎秒60Wのエネルギーが巻線から空隙を介してロータに(消費されているのではなく)注入されていると考えます。発想の切り替えです。注入される電力
![]() と損失
と損失
![]() の差は何だろうか? 次式による機械的出力
の差は何だろうか? 次式による機械的出力
![]() とします。
とします。

ここで大事な仮説として,「モータの中では電力
![]() がステータから空隙を介してロータに流れ込む」と解釈することです。これを専門用語では二次入力と記します。
がステータから空隙を介してロータに流れ込む」と解釈することです。これを専門用語では二次入力と記します。
![]() と損失の比率をすべり
と損失の比率をすべり
![]() で表すと次式になります。
で表すと次式になります。

すなわち,この2つの式より

を得て,出力とトルクの関係

からトルクは

になります。等価回路のパラメータは
![]() に無関係であり,一定電圧のもとでは二次入力
に無関係であり,一定電圧のもとでは二次入力
![]() は
は
![]() に関係なく一定ですからトルク
に関係なく一定ですからトルク
![]() も一定です。
も一定です。
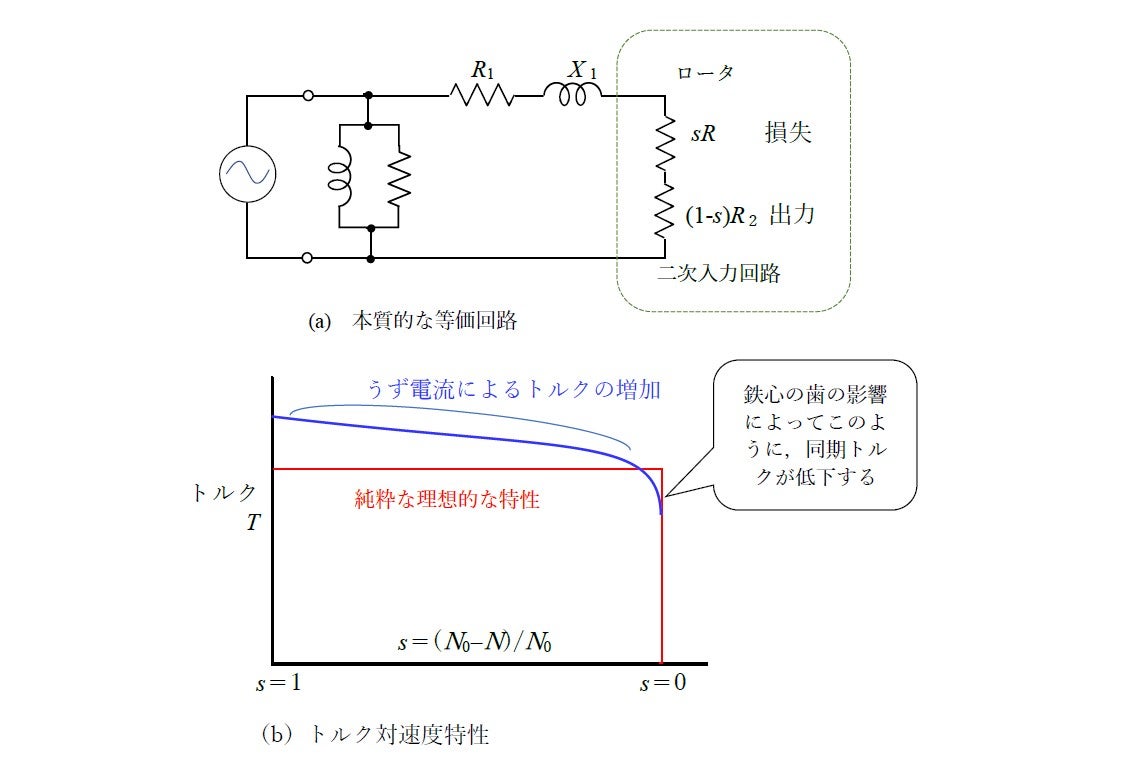
以上より,籠型構造に代えて半硬磁鋼を使うと,交流電源に接続するだけで起動し,加速し,そして同期速度に達して一定の速度で回るモータができます。ヒステリシスによるトルク現象を幾何的な数学を使ってうまく説明したのが第11回にも書いたようにTeareです。その本質をとらえて説明するのが等価回路です。
図16-6
にそれを示しています。籠型誘導モータの場合とは違ってロータに対応する二次回路の抵抗
![]() が滑り
が滑り
![]() に無関係な一定値になります。この
に無関係な一定値になります。この
![]() を
を
![]() の比率に分けると
の比率に分けると
![]() が損失に,
が損失に,
![]() が出力に対応します。そしてトルクは
が出力に対応します。そしてトルクは
![]() に関係なく一定です。つまり,起動から同期運転に入るまで電流もトルクも変わらないことを意味します。数式的にこのように,最も単純なモータこそヒステリシスモータです。電磁誘導による磁界の誘導と磁界だけによって近くの磁鋼に磁極が誘発される現象の違いは,等価電気回路に二次抵抗
に関係なく一定です。つまり,起動から同期運転に入るまで電流もトルクも変わらないことを意味します。数式的にこのように,最も単純なモータこそヒステリシスモータです。電磁誘導による磁界の誘導と磁界だけによって近くの磁鋼に磁極が誘発される現象の違いは,等価電気回路に二次抵抗
![]() の違いとしても現れます。これも豊富なモータタイプの不思議です。
の違いとしても現れます。これも豊富なモータタイプの不思議です。
図16-6(b) は,実際には同期運転に入るときに,トルクが下がることを示します。この原因がステータ鉄心の歯による影響であることを見事に説明したのもTeareです。しかしリングを支える支持体は非磁性体でなくてはいけないことなどを知ったのは筆者自身の実験と計算からでした。
いま見てきたように,自起動同期モータとしてリラクタンスモータとヒステリシスモータの2方式があるのですが,IT機器であるテープレコーダに大量に使われたのはヒステリシスモータでした。その訳を紙面で正確に説明するのは困難ですが,要は均一構造の利点としてトルクのむらが発生しにくいためです。ただし回転速度を電源の周波数とは無関係に正確に制御する必要が高まって,高磁鋼を使うより小さなモータに置き換わりました。それが次に説明するブラシレスモータです。
半硬磁鋼と硬磁鋼の使い分けを明確に示すのが 図16-7 です。

さらに, 図16-8 には同期モータの基本的な3タイプをステータを共有する同一寸法で制作した事例として示します。
電子回路利用型:ブラシレスDCモータ
交流モータの運転法として,発電所から送電される商用電源をそのまま使うのではなく。いったんそれを直流にして,自由自在な電圧と周波数の交流に再変換してモータを回す方法があります。直流電源としてバッテリーを使う典型がEVです。その場合,交流の周波数だけなく,位相も制御します。そのようなことができる電子回路がインバータ(inverter)です。この用語はAC⇒DCの順変換(converter)に対して逆変換DC⇒ACの意味を込めています。インバータを使ってブラシレスDCモータとして起動し,速度調整が可能な方式の基本的なロータ構造がSPMです。それに対して中型・型にはIPM型が使われます。
●SPM(Surface permanent magnet)型
正式には表面磁石型と呼ぶのですが,要するに永久磁石が外から見えるように普通に配置したモータです。 図16-8 には今では古典的になった同期モータの3タイプを並べていいます。右側のCはアルニコ磁石を使って断面を図16-2の形にしたものです。
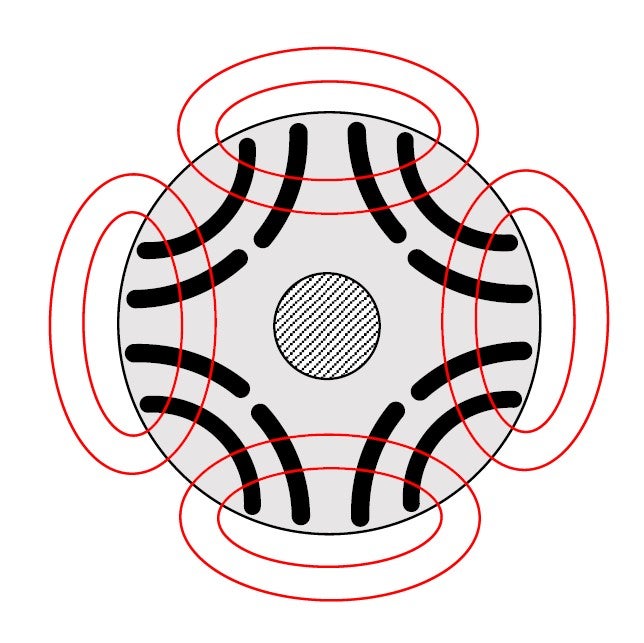
●IPM(Interior permanent magnet)型
永久磁石をロータの内部に埋め込む方式があります。わかりやすくいうと 図16-3 のFlux barrierに八つ橋型の永久磁石を埋め込み,これらの磁石が発生する磁束を通り易くするために凹部をなくして 図16-9 のようにしたのが基本形式です。 図16-3 でみる青の磁束はステータの巻き電電流によるものであり, 図16-9 の赤の磁束はロータの永久磁石による磁束です。これらの組み合わせが現在のEV用永久磁石モータの主流であり,IPM型は貴重な希土類磁石の使用を減らすための構造としてさまざまの工夫が重ねられています。
第17回に向けて
籠型誘導モータの構造を使う超電導モータを次回のテーマとします。第14/15回はその準備を兼ねてさまざまな誘導モータを見て,今回は同期モータのロータ構造を見ていただいたのも,超電導モータとの繋がりのためです。意外なのが,上に見たヒステリシスモータとの類似性です。そこにもモータの不思議の一片が見えるのです。