2-4-1 HB型モータの構造と動作
HB型モータのロータの基本構造は、図2.47 でみるように、軸方向に着磁した円筒形磁石を、2枚の鉄製ロータ(回転子)でサンドウィッチ型に挟んだ構造です。ロータには円周上に歯が刻まれています。2枚のロータは、軸方向から見て歯が1/2ピッチ分ずれるように取り付けられます。固定子には、励磁コイルを持つ複数の極があり、それぞれの極にもロータと同じような歯があります。
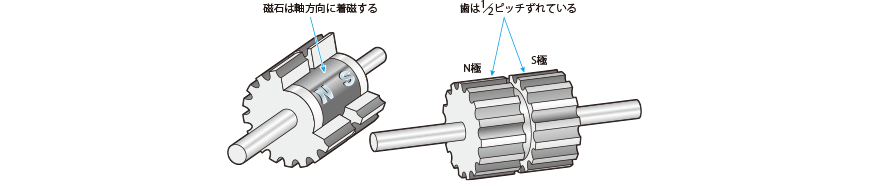
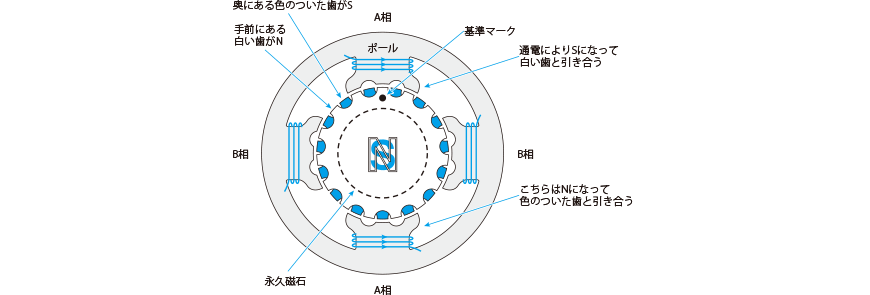
図2.48 は、HB型の回転原理を理解しやすくするために、構造を簡素化した図です。
ステータ(固定子)には、励磁コイルをもつ複数の極があり、それぞれの極にもロータと同じような歯があります。
この図では固定子巻線が4つあり、ロータを挟んで相対するコイル同士が、2組のコイル群として結合されています。コイルは、通電により相対する2つの極が、互いにN極とS極になるよう結合されています。ここで上下のコイルをA相、左右のコイルをB相とします。
図のロータには15枚の歯があります。白い方のロータは手前にあって、永久磁石によりN極に磁化されているとします。色のある方の歯は、奥にあってS極に磁化されているとします。
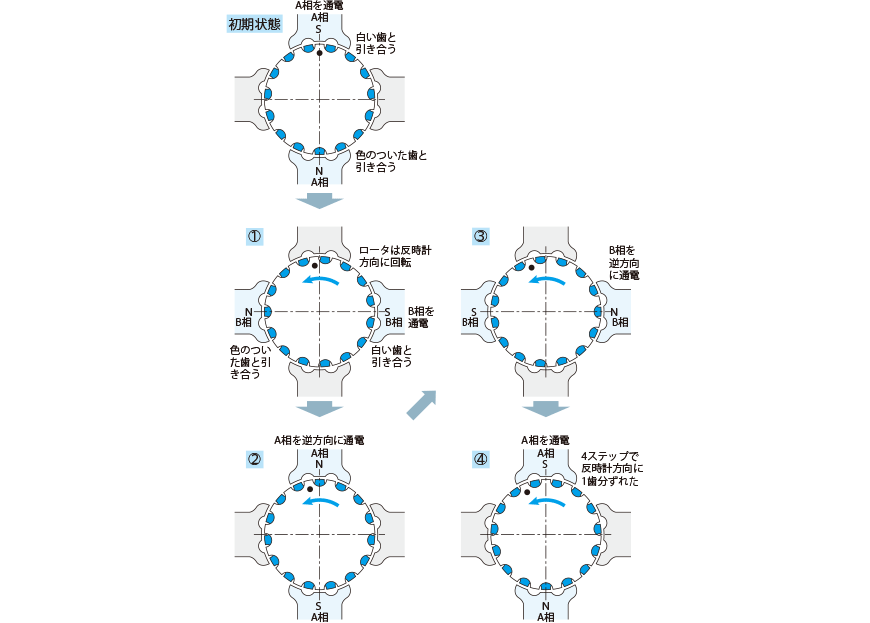
それでは、動作の様子を図2.49 で見てみましょう。
初期状態で、A相に図の上極がSに、下極がNになるよう通電します。白い方の歯はNなので、A相のS極と引き合い、黒い方の歯はSなので、A相のN極と引き合っています。
コイルの通電状態を次の順で変化させます。一番上の歯に●印をつけておきますので、位置の変化に注目してください。
- ①B相に、右極がSに左極がNになるよう通電します。手前にある白い歯は右極と、奥にある色のついた歯は左極と引き合います。●印が、反時計方向に移動しました。
- ②A相に、初期状態と逆向きに通電します。手前の白い歯は下と、奥の色のついた歯は上と引き合います。●印は、さらに反時計方向に移動しました。
- ③B相に、①と逆向きに通電します。手前の白い歯は左極と、奥の色のついた歯は右極と引き合います。
- ④A相に、初期状態と同じように通電します。●印は、初期状態に対して歯1つ分ずれました。
このように、①~④の4ステップで、ロータは反時計方向に歯1ピッチ分移動しました。
時計方向に回転させるには、④~①の順に通電を制御します。
2相HBモータ
前項でみたモータのコイルは、AとBの2相でした。このようなモータを2相HBモータといいます。
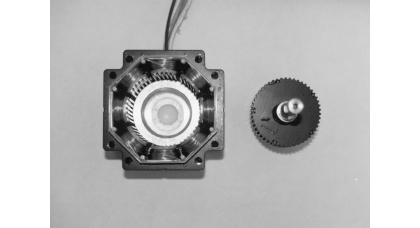
実際の2相モータを図2.50に示します。このモータの歯数は50です。
2相モータは4ステップで歯1枚分回転するので、このモータは200ステップで1回転します。
コイルは8個あり、向かい合った励磁極は同極になるよう結線されています。
このような構造ですと、半径方向の吸着力がうち消し合うので、軸受けへの荷重が軽減されます。
コイルの巻き方
コイルの巻き方には2つあります。
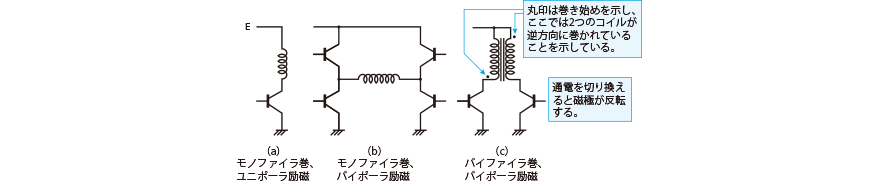
図 2.51(a)のように、一つの極に一つだけコイルを巻くのを、モノファイラ巻といいます。
モノファイラ巻は、コイルの利用効率はいいのですが、通電方向を切り替えるには、図 2.52.(b)のようにトランジスタが4つ必要です。これをバイポーラ駆動といいます。

もうひとつの巻き方は、図 2.51(b)のように、一つのポール(極歯)にコイルを2つ重ねて巻く方法で、これをバイファイラ巻といいます。バイファイラ巻は、コイルの利用効率は落ちますが、図 2.52.(c)のように、2つのトランジスタのどちらに通電するかで励磁を逆にできます。
バイファイラ巻きのコイルの表し方は、A、Bコイルに対し反対方向に結線された励磁コイルは、上にラインを引き、A、Bのように表すのが一般的です(図2.53)。

2相HBモータは、後から述べる5相HBモータと比較すると、
- ・1回転が200ステップになるモータが一般的
- ・5相モータより駆動回路が簡単
という特長があります。
5相HBモータ
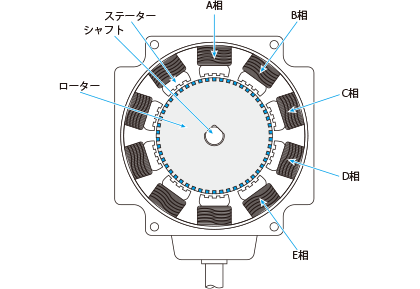
コイルを5組にしたモータが、5相HBモータです。図2.54 のモータにはコイルが10個、歯が50枚あります。2相モータと同様に、対向するコイルを同極にしてラジアル荷重の発生を防いでいます。
5相モータの通電は、次の順序で行います。
①A相をN→②B相をS→③C相をN→④D相をS→⑤E相をN→⑥A相をS→⑦B相をN→⑧C相をS→⑨D相をN→⑩E相をS
以上の10ステップでロータは歯1枚分、1ステップでは0.72゜移動します。
2相モータに比較して、5相モータは、
- ・1回転あたりの分割数が多い
- ・励磁状態のトルク変化が少ない
という特長を持っています。
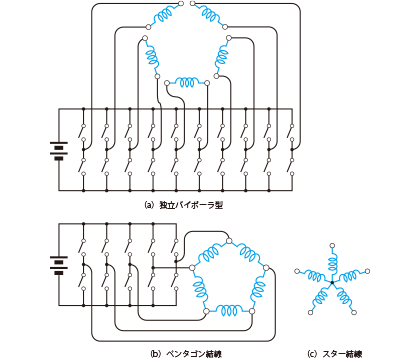
5相HBモータでは、コイルの配線をそのまま引き出すと、電線が多くなってしまいます。
このため多くの5相モータでは、配線をモータ内部でまとめてから引き出します。
5相ステッピングモータの配線のまとめ方には2つあります。一つは、各コイルの一方をすべて結合したスター結線です。もう一つは隣り合ったコイルを相互に結合したペンタゴン結線です(図 2.55)。
スター結線とペンタゴン結線とでは、励磁方式が異なるので、モータとアンプ励磁方式との適合性確認が必要です。
<一口コラム> 5相ステッピングモータの特長
5相ステッピングモータでは、1回転のパルス数は5の倍数です。500あるいは、1000といった数になります。一方、2相ステッピングモータでは、200とか400といった数です。
自動化機器では、1回転の移動量が2mmといった設定よりも、5mm、10mmといった設定の方が都合よいことが多いため、この点も5相モータが好まれる理由です。