2-4-3 ステッピングモータの特性
ステッピングモータのトルクと速度の関係を図 2.57 のように縦軸にトルク、横軸にパルス周波数をとって表します。図には2本の曲線が描かれており、それぞれ起動特性と連続特性と呼ばれます。
起動特性
起動特性は、一定周波数のパルスを与えたときに、停止している状態からどれくらいの負荷トルクを背負って起動できるかを示したもので、引き込みトルク(pull-in torque)特性とも呼ばれます。ステッピングモータの最大トルクは、通常10Hzのパルス周波数での起動トルクで定義されます。なお、ステッピングモータを語るとき、パルス周波数をパルスレートと呼び、その単位をHzの代わりにpps(pulses per second)で示すことが多いようです。
連続特性
連続特性は、一定周波数のパルスで回転しているとき、どのくらいの負荷トルクを加えても回転を続けられるかを示すもので、スルートルク特性、脱出トルク特性とも呼ばれます。
連続特性は起動特性より高い値になります。
起動特性、連続特性とも、パルス周波数の上昇につれて値が低くなります。
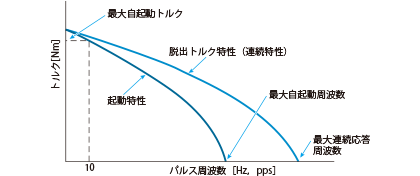
モータが連続動作できる限界を、最大連続応答周波数といい、モータを起動できる限界を最大自起動周波数といいます。
ステッピングモータのトルクが高速域で低下するのは、巻線インダクタンスのため、高い周波数で電流が流れにくくなるからです。
ステッピングモータは、励磁方法と駆動回路により、起動特性と連続特性が変化します。そのためステッピングモータの特性は、駆動回路との関係を含めて、総合的に評価しなければなりません。
<一口コラム> ホールディングトルク
ステッピングモータは、通電状態で停止しているときに外力が加わっても、ロータとステータの間に発生する吸引力によって停止位置を保とうとする性質があります。
この外力に抵抗できるトルクをホールディング(保持)トルクと呼びます。
<一口コラム> ディテントトルク
PM型およびHB型のステッピングモータは、通電していないときもロータ磁石の吸引力で、ある程度保持トルクがあります。このトルクをディテントトルクと呼びます。
パルスレートと回転速度の換算
ステッピングモータの速度は、毎秒のパルス数(ステップ数)である[pps]で表すのが一般的です。これをパルスレート、あるいはステップレートとも呼びます。
しかし、ときには毎分あたりの回転数である[rpm]で考えたほうが便利なときもあります。
モータ1回転あたりのステップ数と[pps]の関係を、[rpm]へ換算した表を以下に示し、換算グラフを図2.58 に示します。