Future Technologies
Collaborative Control Technology for Motors
The microcomputer-embedded Intelligent Motor™ can realize real-time, high-precision collaborative control via wireless network-based telecommunications.
In recent years, as the IoT (Internet of Things) prevails, various robots can be controlled remotely via a wireless network. The robot industry, which is expected to grow larger, is seeing robots being required to transform the way they operate from working alone to working in collaboration with other robots. So far, however, accurate collaborative control of robots, which requires high-precision, real-time control via a wireless network, has not yet materialized because communication delay has kept robot-initiated data and control commands from arriving on time.
In its open innovation project with NEC, Nidec integrated NEC’s wireless communications technology with Nidec’s inter-motor synchronization technology to realize real-time and high-precision collaborative control of robots.
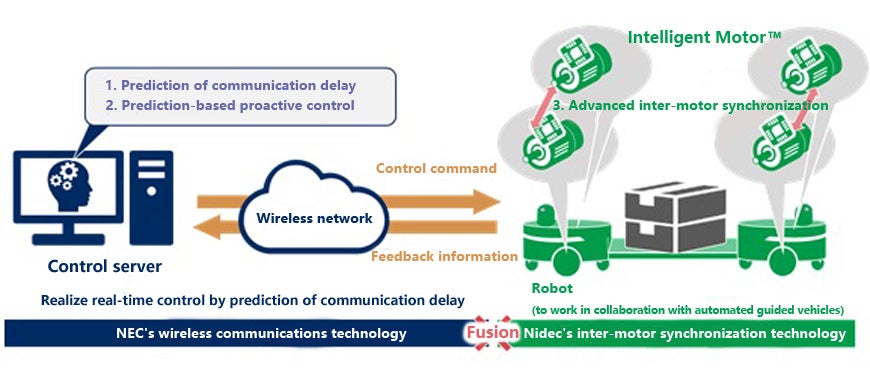
This wireless, Intelligent Motor-based collaborative control identifies a high-precision delay generation probability model in Wi-Fi, LTE, and many other wireless networks, and uses the probability model to predict communication delays (See Note 3).

This communication delay prediction technology enables us to predict how old or new information (location, speed, torque, etc.) is since it was fed back from an Intelligent Motor™, and how much delay is expected before a control command (a location- or speed-related command) is transmitted to an Intelligent Motor™.
Predicting communication delays makes possible an accurate estimation of the conditions of an Intelligent Motor™ at the time and place of a control command’s arrival, and a proactive control (See Note 4) based on the estimated future condition of the Intelligent Motor™, as part of the remote real-time control, including communication delays.

The communication technology with these features, combined with the technology to synchronize Nidec’s microcomputer-equipped Intelligent Motors™, realizes a high-precision synchronization by closely linking multiple Intelligent Motors™ and a collaborative control of multiple Intelligent Motor™-mounted robots. In addition, this method eliminates the need for a control computer, an expensive component required on the robot’s side in the past. This innovation enables, for example, those transferring goods in a factory or a warehouse to use in combination multiple low-cost, compact, and automated guided vehicles instead of large, expensive ones, to transport items of various shapes and weights, and reduce operation cost.

Nidec is verifying and making products that use this technology, which can be applied to, among others, the remote control of automated guided vehicles in a factory or a warehouse, security robots, disaster inspection robots, and inspection and delivery drones, in many parts of society.

———————————————
(Note 1: Intelligent Motor™
Nidec-developed, microcomputer-imbedded motor, which can be easily controlled via a wireless network, and whose information the user can obtain, including its location, speed, and torque.
(Note 2: Transportation efficiency
Time required for a remotely controlled automated guided vehicle to transport an item along a designated route
(Note 3: Communication delay prediction
By defining a communications network in its high delay and low delay conditions, Nidec discovered that that it can very accurately predict the transition model of these two delay conditions by using a transition probability model of a certain molecule’s high- and low-energy conditions. Nidec also verified in an actual network environment that it can improve the rate of prediction error by approximately 30% compared with the latest research results of the same kind.
(Note 4: Proactive control
A controlling method that predicts a control system’s future conditions.
“Intelligent Motor” is a registered trademark of Nidec Corporation in Japan.