The motors that drive WALKCAR, the “portable car”
Revising a case structure and use an advanced designing to make a “portable car”
- NEEDS
- Stabilize compact mobility’s driving performance
- SOLUTION
- Develop durable, high-output in-wheel motors with little individual differences.
Electrification is ongoing in all areas of mobility, including bicycles, scooters, and mini-scooters. Among these products, a growing amount of attention is being paid on WALKCAR, the highly unique four-wheeled EV that one can lightly drive standing, while enjoying its stability as a four-wheeled vehicle. Though it is small enough (13 inches, the size of a notebook PC) to be carried in a bag, WALKCAR can run at a maximum speed of 16km/h. This product may become a smart daily means of transportation if traffic laws are relaxed in the future.
This new mobility vehicle has installed compact in-wheel motors that NIDEC ADVANCED MOTOR has newly developed. In-wheel motors, which rotate wheels directly, not only helps simplify the structure of a car and reduce its size, they don’t require gears for speed adjustment, creating a number of merits such as improving a vehicle’s low-noise performance and contributing to its weight reduction.
Thorough rigidity improvement measures and compact, high-power specifications to meet the requirements of the unique mobility
In addition to being light and compact, WALKCAR was required to be powerful enough to be able to start running smoothly with an adult riding it, and also be rigid enough against shocks generated after driving onto a curbstone, Braille blocks, and other stepped surfaces. To meet these requirements, NIDEC ADVANCED MOTOR reviewed its conventional in-wheel motors from their basic structures.
Usually, an in-wheel motor comprises an outer case to handle rotation, and a base, which includes a ring to fix the structure. With the rotating body supported only by the base, a conventional in-wheel motor has had a problem of experiencing an inconsistent rotation when exposed to an external vibration.
The ring must be improved to enhance an in-wheel motor’s rigidity. As shown below, the ring, which is fastened to the bearing, rotates. The base (fixed section) is the flange only, and the motor’s rigidity must be improved by welding (integrating) the ring, the yoke, and the hub together.
Thus, NIDEC ADVANCED MOTOR welded and integrated the ring, which is connected to the fixed axis, with a hub, the outer component, and make both the case and the entire base rotate, to successfully enhance the motors’ rigidity.

The maximum output of a motor from the conventional product lineup is 30W at 60φ. In this latest project, however, the requirement was to generate an output of 65W at 60φ. To meet this requirement, Nidec Servo created a high-density design of 14 poles and 12 slots, which are more than the regular design of 10 poles and 12 slots. With this new design, an improved interlinkage magnetic flux achieves a higher torque, while reducing the periodically occurring torque ripple.
The use of high-flex wires and the reduced rotational deviation to help wheels run stably and comfortably
To prevent vibration-caused disconnection of lead wires and the detachment of internal magnets, the raw material selection process and work process were both revised. In the end, NIDEC ADVANCED MOTOR adopted high-flex wires to receive and release tensions, and created a way to use a unique device to apply a thin layer of adhesive evenly, to improve the motors’ durability.
WALKCAR has a truly short wheel base of less than 200mm. A mobility vehicle’s straight-running stability improves as its wheel base (the distance between the front and rear wheels) becomes longer. However, a long wheel base is not appropriate for the light and compact WALKCAR. Additionally, its driving force is generated by the in-wheel motors located at the front and rear of the vehicle, and if each motor rotates at a different speed, it can’t even move straight. Normally, there is an individual difference of 10 – 15% among motors in their manufacturing process, but the difference needed to be made within 5% in WALKCAR’s manufacturing line.
Thus, to accurately understand the strength of the magnetic force inside the motors, NIDEC ADVANCED MOTOR revised the way to mount the sensors to be installed inside them. Generally, the variance of motors’ rotating speeds due to the locations of the sensors is negligible; however, by using dedicated jigs and automatic inspection equipment programmed with a strict standard, NIDEC ADVANCED MOTOR successfully contained the variance within the ±5% range.
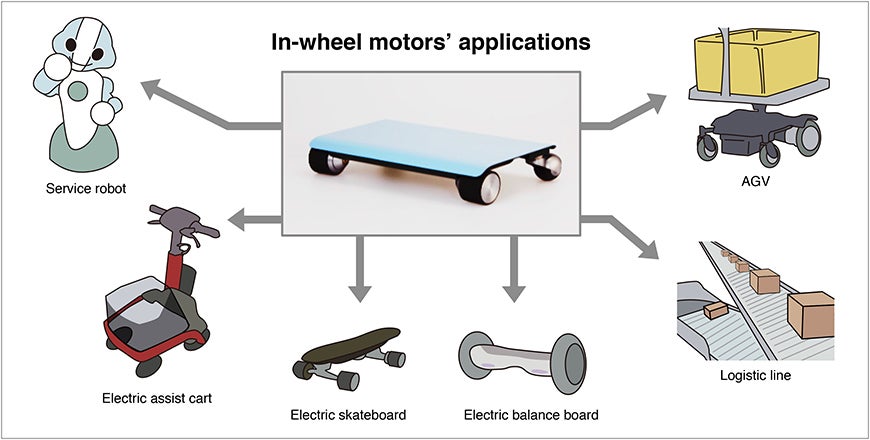
This is how the company made compact, light, durable, and high-output in-wheel motors, which are expected to be used in various other mobility products such as automated guided vehicles, electric assist carts, and service robots.